-
リンク
「プロジェクト」カテゴリーアーカイブ
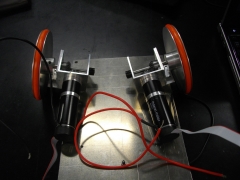
ギアボックスの作り直し
以前作った右側のギアボックスが、穴のあけ位置を間違えていたので作り直しました。左右の高さがあうので、走りが向上されると思います。シャーシやサーボモーターを載せている板も、板金加工に失敗している部分があるので作り直します。(目黒隼人君:機械工学科4年)


3号機:上下せり出し機構
上下せり出し機構と駆動部分を作成中です。上下機構が上に上ってダミヤンを救助するために、アームをせり出した時に、ロボットが横転するのではないか? と懸念が出ています。反対側にガレキ除去用のアームが搭載されるので、それと相殺できる予定ではいます。(清家悠太郎君:電子機械工学科2年)
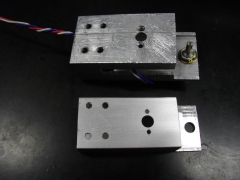
アーム部品
アームを固定するための関節を作成しました。アームを取り付けるために複数の穴をあけました。もしかしたらアームにセンサを搭載するかもしれないので、拡張用の穴も事前にあけました。(西原琢也君:電子機械工学科2年)
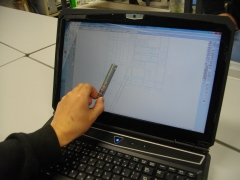

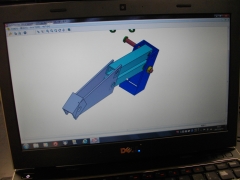
2号機:アーム設計
CADで設計をやりました。レイヤーの使い方で悩みました。ほとんどの部品の設計を終了し、寸法出しまでできています。あと5時間くらいでアーム設計が終了する予定です。(鼓 悠介君:環境技術学科2年)
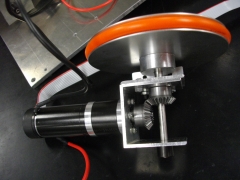
右のギアボックス
加工のときに万力で挟みすぎてしまい、部品がゆがんでしまいました。組み立ててみてこのままいけるかどうか確認してみます。(目黒隼人君:機械工学科4年)

プログラム:TPIP通信
レスコンボードとの通信ができるようになりました。ロボットに搭載したカメラからの映像をモニタに表示するところを作りこんでいます。(平戸祐司君:電子機械工学科2年)

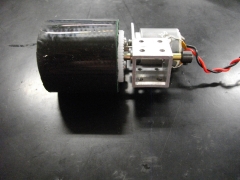
1号機:駆動部分
中村 介君(機械工学科3年) に部材を寸法に合わせて切断してもらいました。もう1本、少し違う部品を作り、ギアを組み込んで精度をみます。(田中 亮君:電子機械工学科3年)
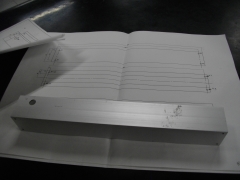

仮組から、配線加工
車軸の位置やマイコン配置の微調整をするために、仮組をしました。一度バラして、精度を出して組みなおします。モーターの配線加工もやりました。(宮本普太郎君:機械工学科2年)