
-
リンク
「プロジェクト」カテゴリーアーカイブ
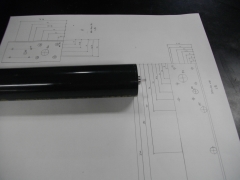
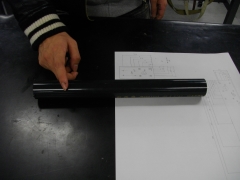
2号機:ベルトコンベア
ベルトコンベアのベルトを摩擦で廻すための軸を作成しました。次はこの軸を取り付ける板金加工に入ります。(鼓 悠介君:環境技術学科1年)
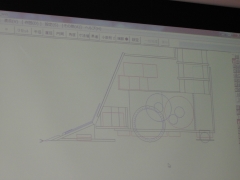
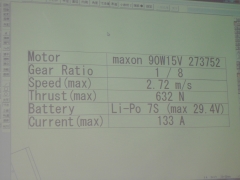
新型機設計
去年のロボットは相手ロボットの角を取る設計でした。そこそこ勝てたけれど、押しが弱くて負けたことがあります。その反省点を活かして、新型機を設計します。想定数値を出して設計し、組み立てた後に想定とどのくらい誤差があるか検証します。(西原琢也君:電子機械工学科1年)
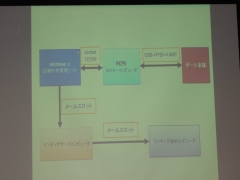
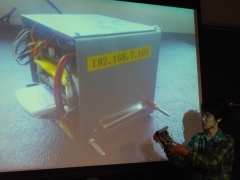
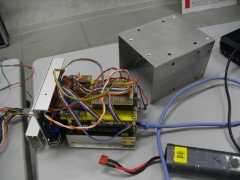
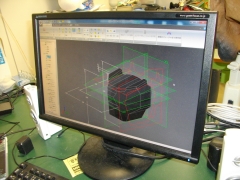
CACSユニットの改良
コアユニットを新しくしました。内部がスライドで外れるようにしてすっきりとし、コネクタも減らしました。プロジェクタに映っているのが、2012年度の初期バージョンです。(中村祐一君:電子機械工学科3年)
新型機設計
新型機の設計をしています。センサやモータの配置がなかなか定まらずに苦労しています。部品のサイズを確認しながら設計を詰めています。(阿部史和君:メディアコンピュータシステム学科2年)


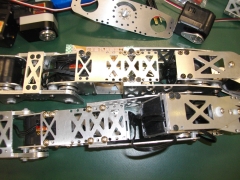
ネジの発注待ち
新型機の脚を組み立てたら、ネジの在庫が足りませんでした。長いネジをナットをかませて無理やり仮組してみました。発注しているネジが届くのを待って組み立てなおします。(榧木方俊君:メディアコンピュータシステム学科3年)

カーブの調整
速いスピードでカーブに入ったときの減速プログラムを調整したら、いい感じで完走するようになりました。少しずつ、練習走行のタイムを縮めていっています。(大西祐喜君:通信工学科2年)

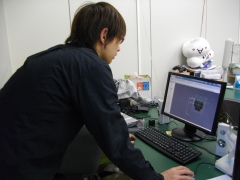
3DCADに挑戦
杉本大樹さん(メディアコンピュータシステム学科2年)に3DCADの使い方を教わり、ボディの設計をしました。ここまで製図するのに1時間くらいかかっています。立体のイメージが見た目で直感的に分かるので嬉しいです。(三谷峻生君:メディアコンピュータシステム学科1年)
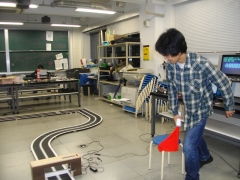
スタートフラッグ
スタートゲートのオープンをWiiコントローラーに対応させました。加速度センサの値をPCが読み取ってゲートを開きます。便利なライブラリがあったので、簡単に実装できました。(中村祐一君:電子機械工学科3年)