
-
リンク
「プロジェクト」カテゴリーアーカイブ
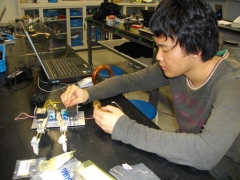
アーム
2号機、3号機のアームの外形が完成したので仮組みをしました。このまま本番機になりそうですが、かなり重いので肉抜き等の調整が必要だと考えています。(奥田友彦君:機械工学科3年)


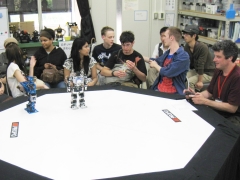
シェリダンカレッジから見学
学術交流協定校であるカナダ・シェリダンカレッジから学生9名、大学関係者2名が四條畷キャンパスに来学、自由工房も見学されました。
自由工房の概要を説明し、河口真丈君(メディアコンピュータシステム学科3年)がヒト型ロボットプロジェクトの活動を説明しました。3体のロボットによるバトル、荒柴祥太君(情報工学科4年)ヒト型レスキューロボットの実演をしました。
見学時間は30分ほどでしたが、見学者からはロボットの動きに笑いと拍手がわいていました。最後に行った操作体験は、一番楽しんでもらえたと思います。



クランクの調整
機構的には、クランクを曲がるようにセンサーアームが切れるのに、走行させると曲がりきれずに落ちてしまいます。ソフトの問題だと思うので、調整しています。(大西祐喜君:通信工学科2年)


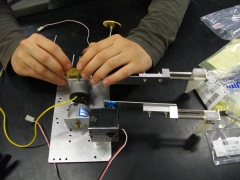
4号機:設計見直し
最初の設計で仮組みしたところ、横からの衝撃に弱いことが判明しました。梁を渡すことを考えましたが、スライドアームの邪魔になります。他の方法を検討中です。(目黒隼人君:機械工学科3年)

技術講習会の課題
第1回目の課題は、バンドソーで部品を切り出し、ボール盤で穴あけとヤスリで仕上作業です。部品のサイズは誤差±0.3mmまでは許容範囲としました。一応、穴の精度には問題がないと思います。

クランクでコースアウト
クランクでコースアウトします。クランクで外側のラインを中央ラインと間違えてしまっているようです。クランクの検出はしているので、プログラムをチェックして修正します。(三原和也君:通信工学科2年)


本体が完成
本体が完成しました。ネジ穴がズレてしまったので、応急処置でマジックテープ止めをしています。調整してバグだしをしてから、カバーを作り直します。(阿部史和君:メディアコンピュータシステム学科2年)

新型機完成間近
kurara M.KIIの進化版がもうすぐ完成します。平行リンク脚のバランスが悪かったので、作り直しました。27日に開催されるテクフリ練習会でデビューを飾る予定です。(杉本大樹君:メディアコンピュータシステム学科2年)


新メンバー募集説明会 in 四条畷
第2回目の新メンバー募集説明会を、四条畷でも実施しました。寝屋川からも上殿泰生君(機械工学科3年)がきて、全体の説明をしました。ヒト型プロジェクトは、実際にロボットを動かして活動を分かりやすく説明しました。

