



-
リンク
「知能ロボコン」カテゴリーアーカイブ
モータードライバー故障
知能2回後藤です。現在来年の知能ロボコンに向けての機体を作っていっているのですがプログラム作成途中に突然モーターが不調になりその後モーターとの間につながっているモータードライバーが爆発しました。原因は現在も不明で少し暗闇をさまよっている感じです。もし何かわかる方いましたら連絡ください。よろしくお願いします。原因究明にむけて頑張ります。写真は爆発したモータードライバーです。
カテゴリー: 知能ロボコン
ブログ投稿テスト 初めまして
初めまして。知能ロボット班現2回生後藤です。ブログを初めて使うのでちょっとテストで1つ投稿しました。ちゃんと見ることができてますか?今後はこちらにも週1日~2日程度活動記録を残していけたらと思います。(忘れていなければ)写真は知能用の機体下部の板と1年生のライントレーサーです。それではよろしくお願いします。
カテゴリー: 知能ロボコン
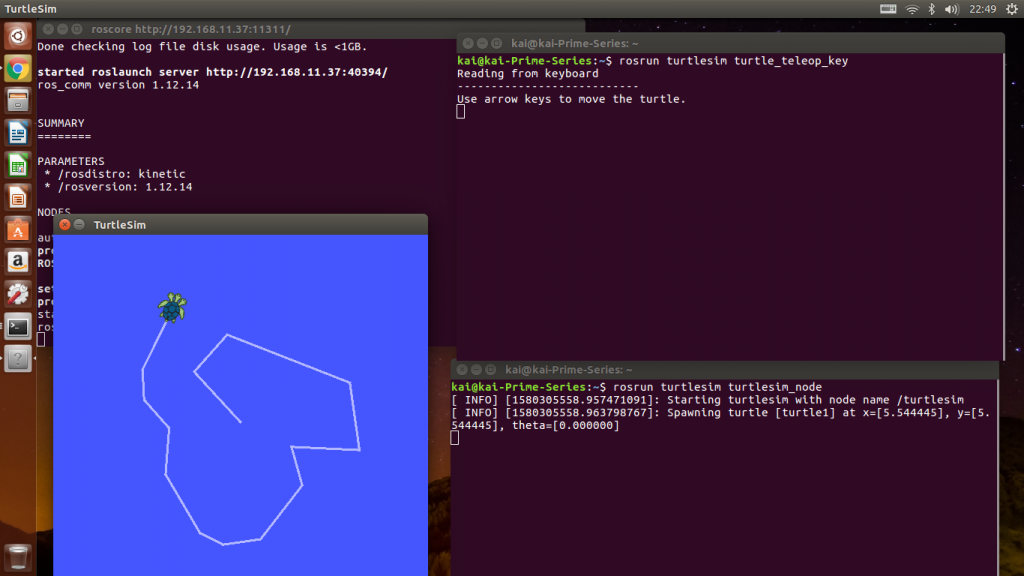
UbuntuにROSを導入しました。
中之島チャレンジ用のロボットにはROS(Robot Operating System)を搭載する予定です。
それにあたり、使用度の低いパソコンにUbuntuを入れてROSをインストールしました。
早くUbuntuやROSに慣れることができるように頑張ります。
カテゴリー: 知能ロボコン
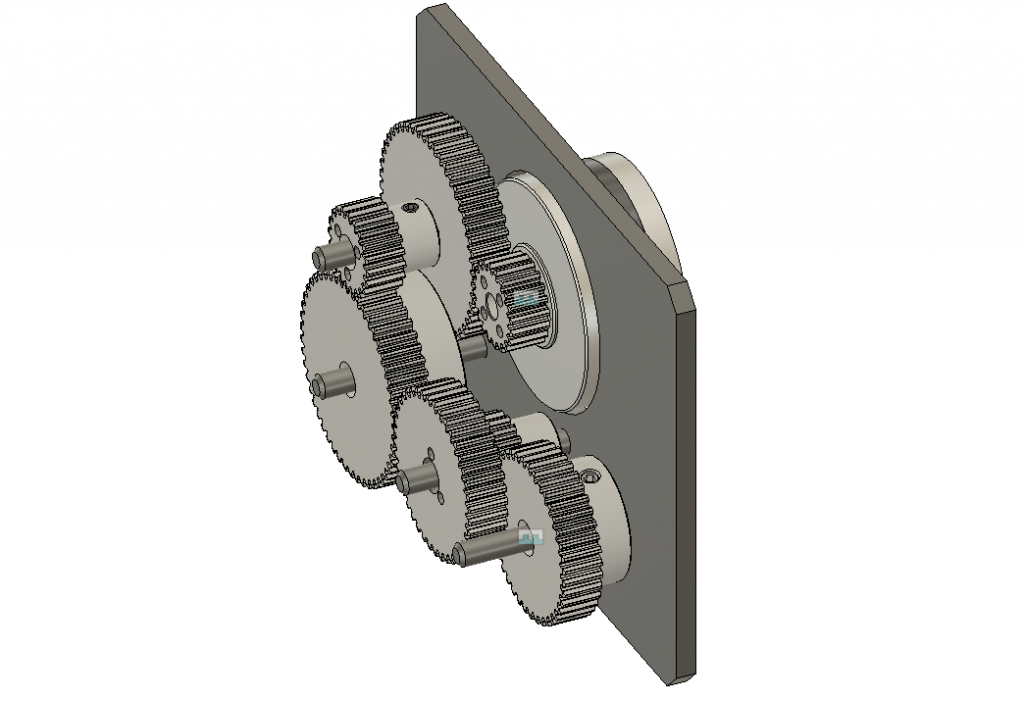
ギアボックスの設計ができました。
中之島チャレンジ用のロボットに搭載するためのギアボックスの設計が完成しました。
このギアボックスに加えて、スプロケット側でも減速をかけるつもりです。
カテゴリー: 知能ロボコン
友電会 京都支部総会で活動報告
令和元年 11月17日(土) からすま京都ホテルで大阪電気通信大学友電会 京都支部総会が開かれました。
自由工房から 知能プロジェクトとヒト型プロジェクトが出席し、各プロジェクトの活動報告をしました。 OBの方から専門的なアドバイスを今後の活動に活かしていきたいと思います!!
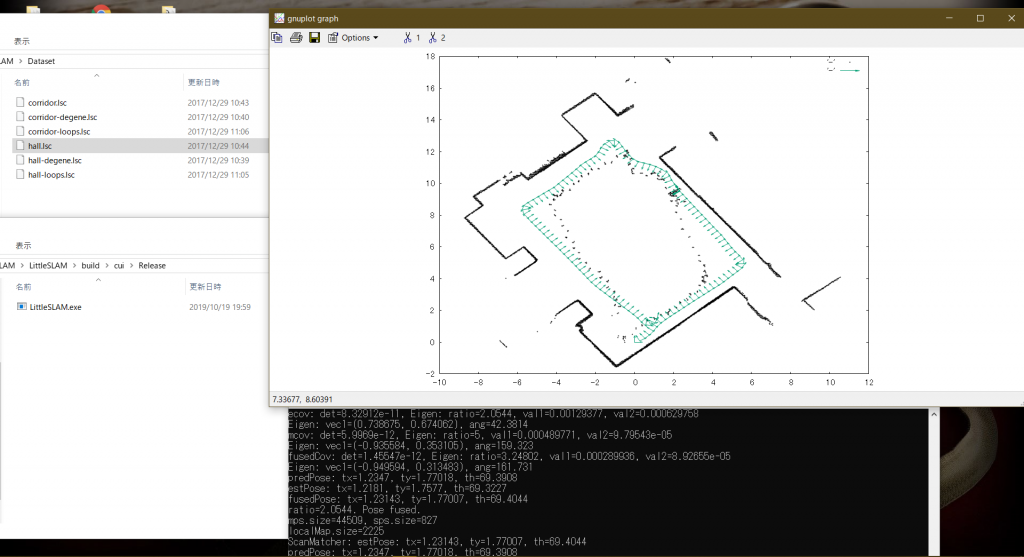
SLAMの環境を導入しました。
SLAMの環境を構築しました。SLAMを使うと広範囲距離センサからマッピング、そのマップから自分の位置を割り出すことができます。この技術を新たに挑戦するプロジェクトに使用するつもりです。
カテゴリー: 知能ロボコン
Raspberry Pi 4 を購入しました。
発売されたばかりのRaspberry Pi 4の4GB モデルを購入しました!知能ロボットコンテスト用のロボットに搭載したいと考えています。画像処理やRobot Operating Systemの処理に使用する予定です。
カテゴリー: 知能ロボコン
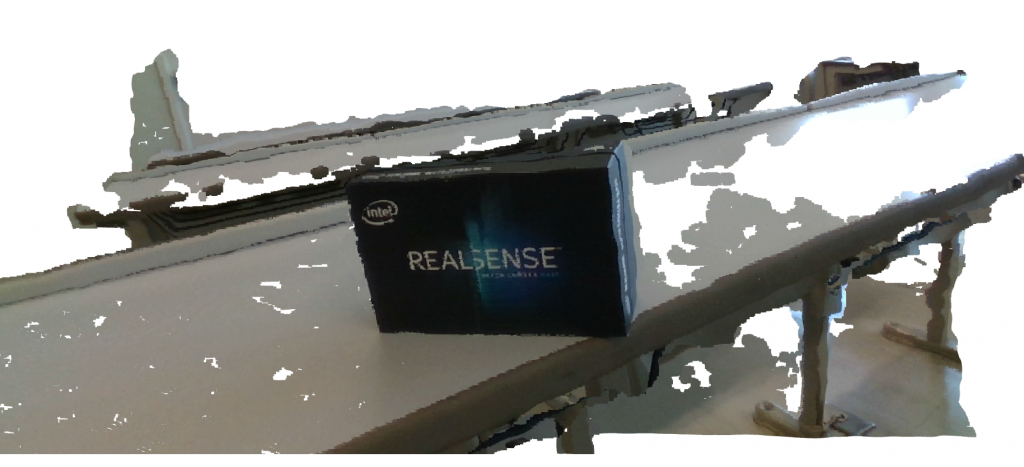
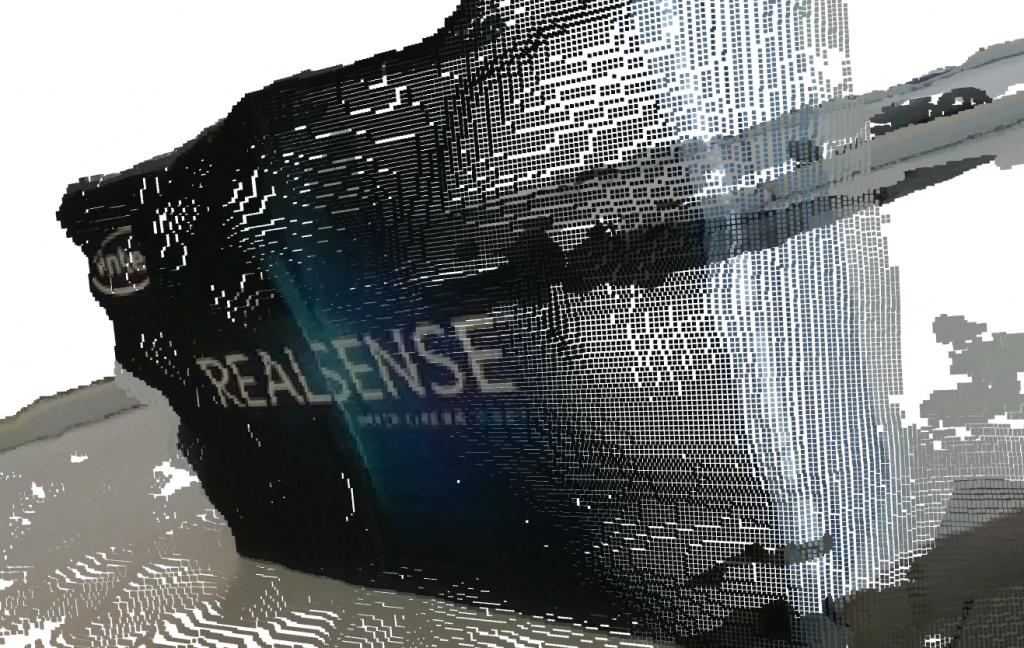
深度カメラを使用して点群表示ができるようになりました。
深度カメラのRealSense D435とOpen3Dを使って点群表示ができるようになりました。
今後はRANSACを用いた平面除去で、机の上にある物体を検知したいです。
カテゴリー: 知能ロボコン
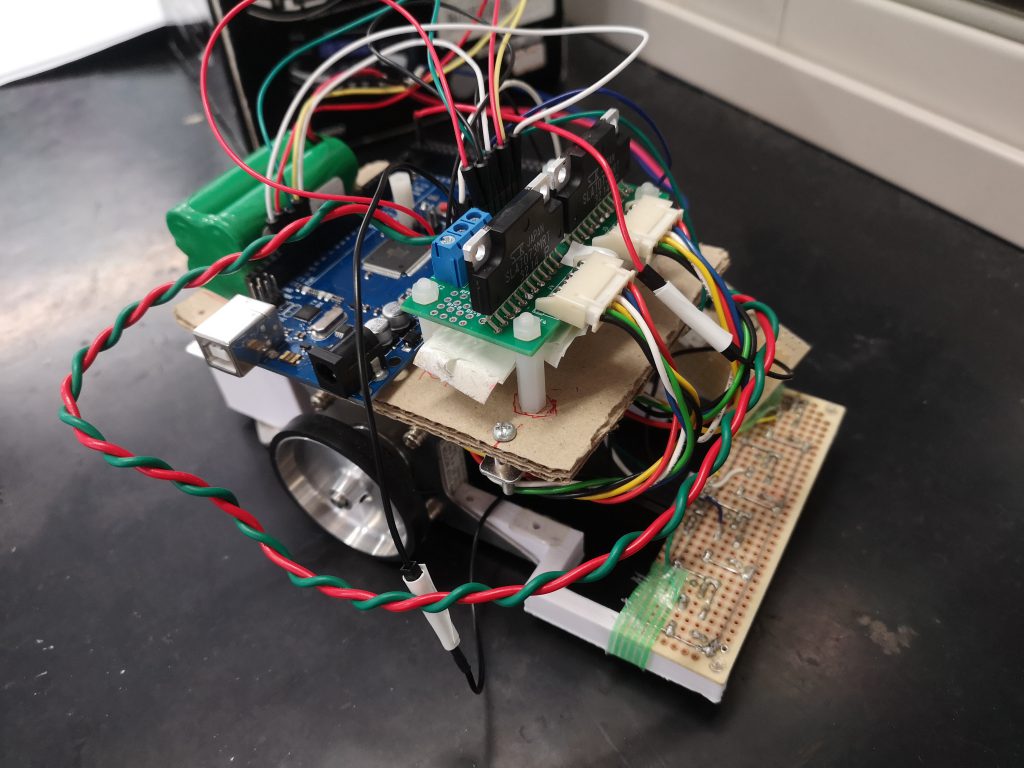
ライントレースロボットが完成しました。
一年生のライントレースロボットが完成しました。このロボットでプログラムの基礎を学びます。
来年の知能ロボットコンテストに生かせるよう、頑張ります。
カテゴリー: 知能ロボコン