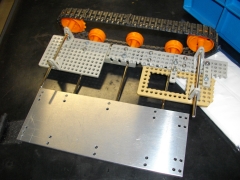
上下機構、足回り、配線のための穴などを設計しました。ダミヤンを救助するアームがまだできていません。サーボを小さくしたいので、新しいものを発注しました。サーボが届き次第、設計に入ります。スライドレーンは、いい素材を探しているところです。(清家悠太郎君:電子機械工学科2年)


上下機構、足回り、配線のための穴などを設計しました。ダミヤンを救助するアームがまだできていません。サーボを小さくしたいので、新しいものを発注しました。サーボが届き次第、設計に入ります。スライドレーンは、いい素材を探しているところです。(清家悠太郎君:電子機械工学科2年)
ホームポジションを取ったときに、変なポーズをとって、その後にホームポジションになる現象が出ています。ヒト型ロボットプロジェクトの三谷峻生君(メディアコンピュータシステム学科2年)が来て、バグが見てくれました。原因がわからないので、基板を変えて様子を見てみます。(中村 介君:機械工学科3年)


サーボの曲げ角を調整して、クランクを曲がれるようにしました。秒速3mならきれいに曲がっています。スピードを上げると遠心力が働いて、外に膨らんでしまってコースアウトします。ブレーキングのタイミングと速度に応じた強さを検討して、タイムを落とさずに走れるようにしたいです。(三原和也君:通信工学科3年)


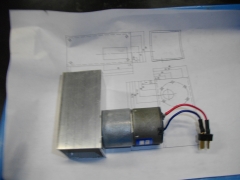
清家悠太郎さん(電子機械工学科2年)が設計中のロボットの部品を作りました。ベッドを上下に移動するモーターの取り付け部品です。切り口を平らにして精度をだすにのに時間がかかりました。穴あけを間違えてしまいましたが、清家さんがすぐに気づいてくれたので、よかったです。(高木裕一郎君:電子機械工学科1年)

夏休みに入部先生に教えていただいたモータードライブ基板についてを、マニュアルにまとめています。新1年生が見てわかるようなものにしたいです。ネットで情報を調べて回路図を描いたり、PWMの説明ができるようにしました。(皷 悠介君:環境技術学科2年)

マイコンボードの書き込みテストをしました。書き込みのエラーが起きたので、マイコンとケーブルとどちらに原因があるのか検証中です。(宮本普太郎君:工学部機械工学科2年)


中村祐一さん(電子機械工学科4年)が作った、マイコンカーゲートの仕様書をまとめました。計測ソフトと連動しているので、試走会や電通大杯で誰でも使えるようにしておきます。ランキング部分はまだ未対応です。(三原和也君:通信工学科3年)