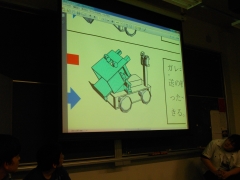
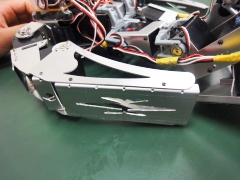
救助ユニットが形になりました。ベルト駆動でベッドの上部が動いて、ダミヤンを救助ベッドに運び入れます。(田中 亮君:電子機械工学科2年)



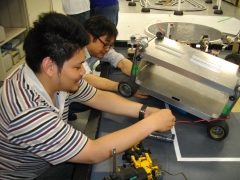
右側ギアを仮組みして設計の確認しました。微妙なズレがありましたが、許容範囲ということでOKになりました。左側も組み上げて完成しました。(鮫島智樹君:電子機械工学科2年)

以前のアームが重過ぎてバランスが悪かったので、肉抜きをして軽量化を図りました。おかげでモーションが安定してきています。日曜日のテクフリ練習会に向けて、調整中です。(河口真丈:メディアコンピュータシステム学科3年)
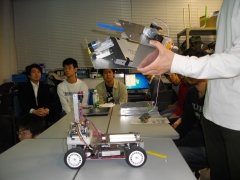
フラップを動かすのにリンク機構を使っています。そのリンクがフラップを下ろしすぎたとき、駆動エラーで戻らなくなってしまいます。その対策として、1)電気的にリミッターを搭載、2)機械的にアクチュエータの軸にストッパーをつけて下がりすぎないようにする。どちらにするか検討中です。(鹿島健吾君:電子機械工学科3年)
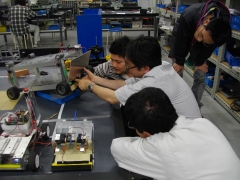
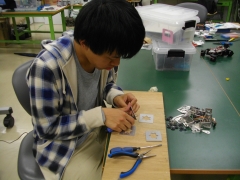
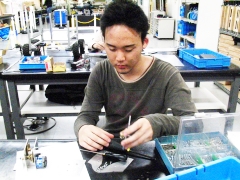
安全講習会が終了し、寝屋川の新メンバーが各プロジェクトのロボット製作をスタートしました。今は、先輩たちの指示でカンタンな作業をしていますが、1年後にはオリジナル設計のロボットを製作できるようになっています。

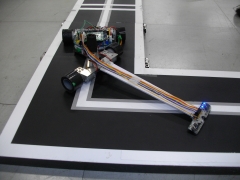
ハンドルの切り角とか、センサがクランクのマークを読んだときの減速を調整しました。これにより、外線を読んでしまった時にコースアウトすることがなくなり安定して周回できるようになりました。来週からはレーンチェンジに調整します。(大西祐喜君:通信工学科2年)


後輪ギアの左側を仮組立て中です。強度や精度を確認して、OKだったら右側も作ります。来週には完成します。(鮫島智樹君:電子機械工学科2年)


PID制御を調整して、走行が安定しました。クランクは検出パターンと速度を調整してキレイに走れるようになりました。今の完走率は3割くらいです。検出パターンをもっと調整して、完走率をアップしていきます。(三原和也君:通信工学科2年)

ダミヤン救助ユニットができました。上部に搭載したユニットが、後ろのアクチュエーターが斜めに可動して、救助ユニットを床に押し下げます。アームはスライドレールで、前後に動いて、ダミヤンを引き寄せます。(中森智史君:電子機械工学科2年)