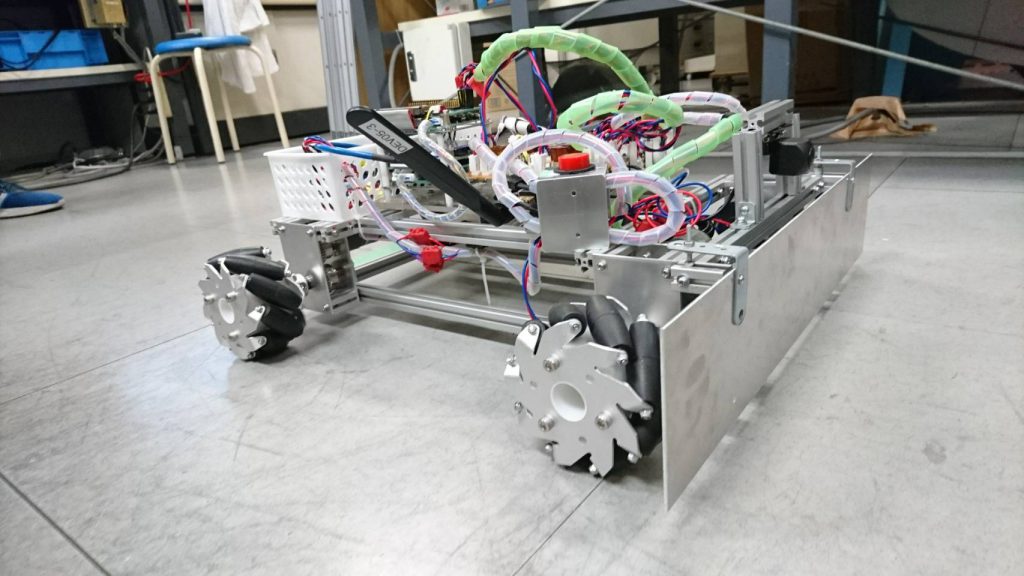
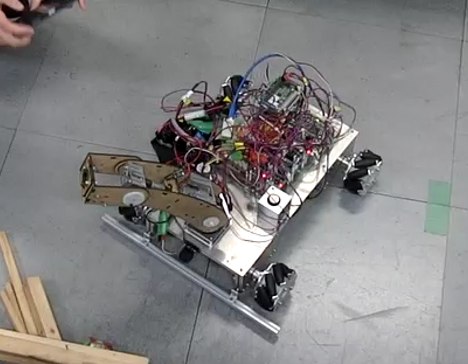
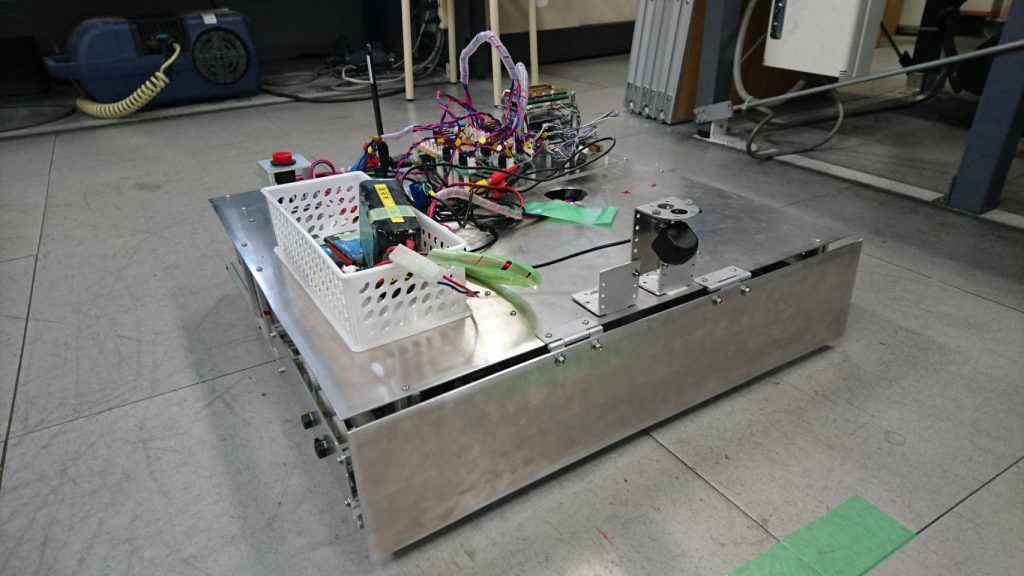
秋課題として行っていたメカナム機が各チーム完成しました!
発表会をして各チーム想定通りに機体が走るか確認したところ
モータの選定ミスや配線のミスが見つかりましたが
全機目標としたタスクはクリアできました!
また、秋課題の反省会を行いミスが起こった理由や、スケジュールの遅れについて話し合いました

秋課題として行っていたメカナム機が各チーム完成しました!
発表会をして各チーム想定通りに機体が走るか確認したところ
モータの選定ミスや配線のミスが見つかりましたが
全機目標としたタスクはクリアできました!
また、秋課題の反省会を行いミスが起こった理由や、スケジュールの遅れについて話し合いました
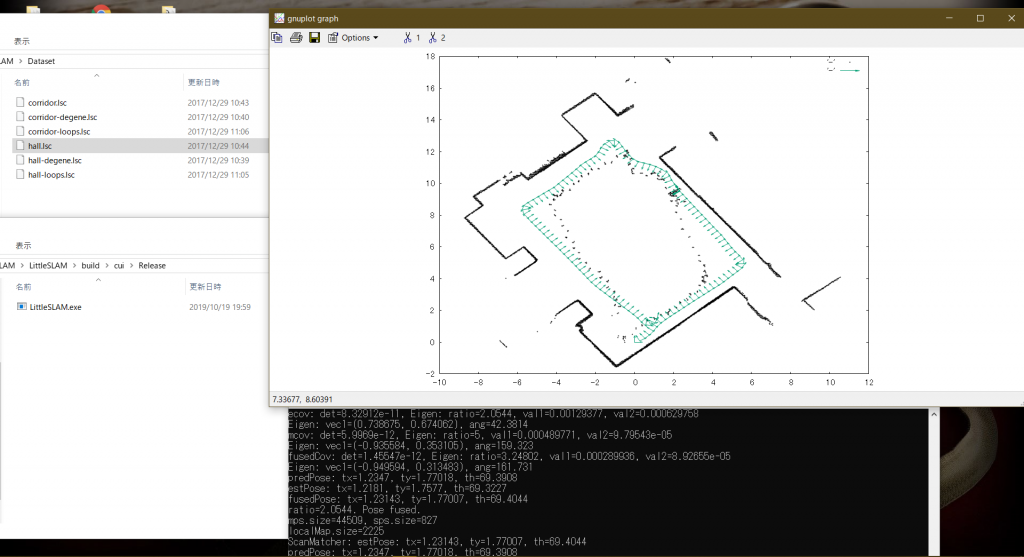
SLAMの環境を構築しました。SLAMを使うと広範囲距離センサからマッピング、そのマップから自分の位置を割り出すことができます。この技術を新たに挑戦するプロジェクトに使用するつもりです。
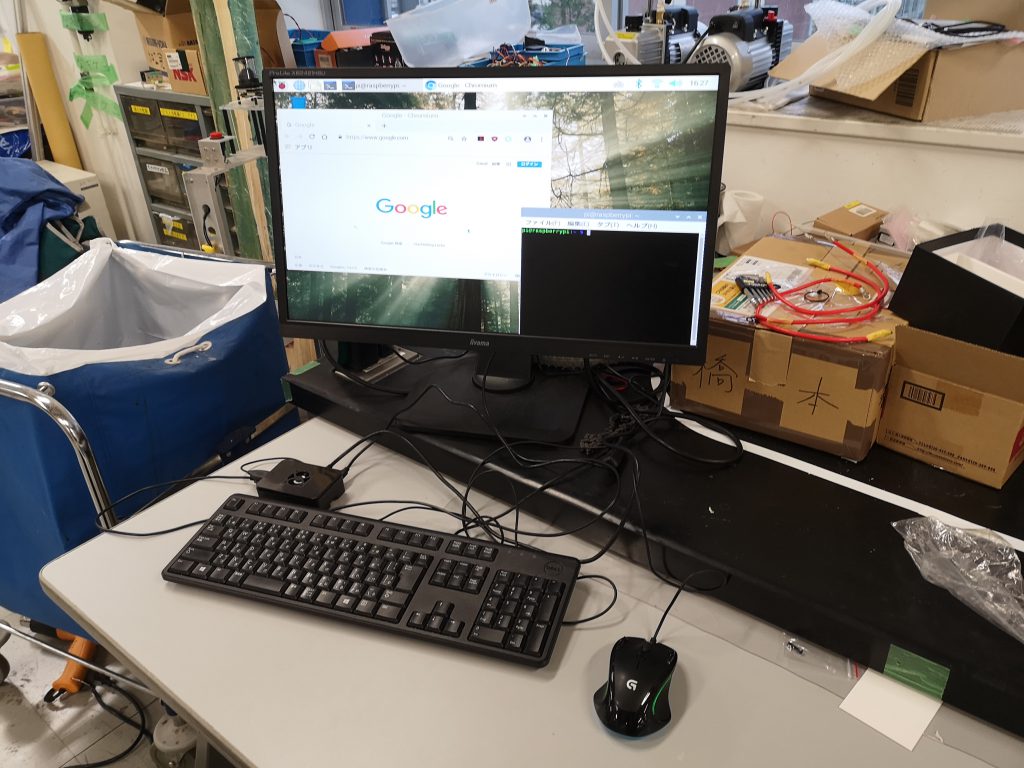
発売されたばかりのRaspberry Pi 4の4GB モデルを購入しました!知能ロボットコンテスト用のロボットに搭載したいと考えています。画像処理やRobot Operating Systemの処理に使用する予定です。

マイクロマウスの試走会を11月3日にY号館5階で開催します。クラシックサイズの迷路とマイクロマウス(ハーフ)の迷路が一面ずつ展開しています。10時から17時ぐらいの想定です、ぜひ来てください。

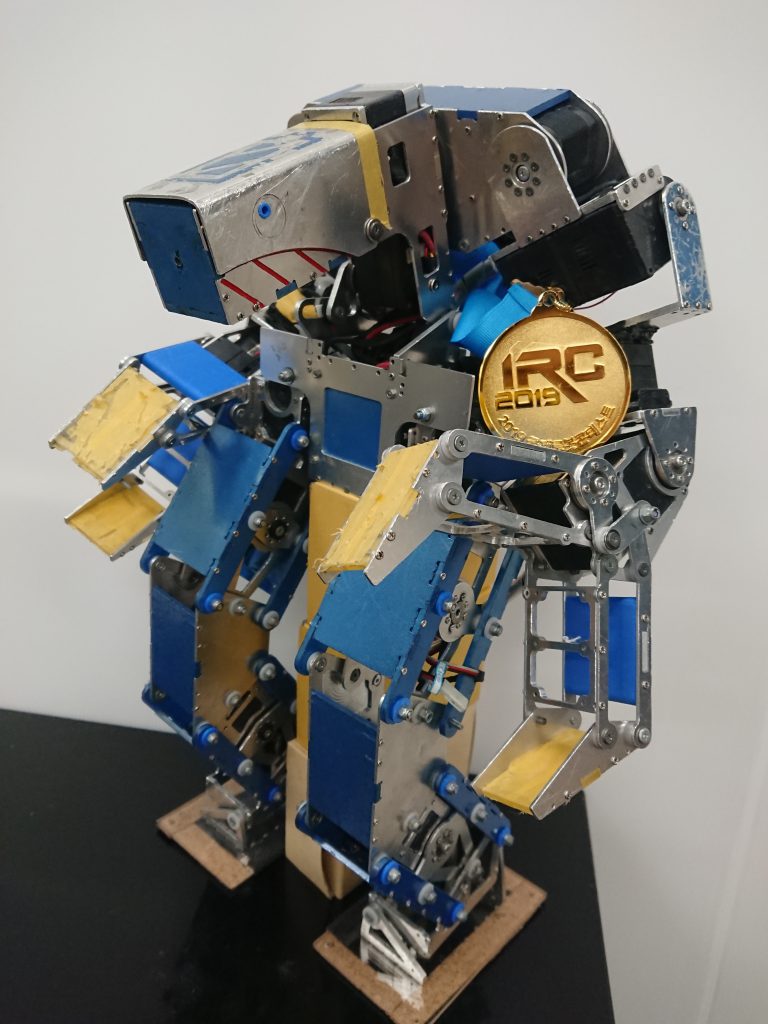
2019年10月11日,12日 韓国のKINTEX1ホールでIntenational Robot Contest 2019が開催されました。自由工房の学生1名を含めたチームJapanが12日に行われた団体戦で総合優勝しました。

11月の茂木大会に向けて、シャーシの変更を行いたいと思います。

エコラン界隈ではかなり浸透してきた木製フレームです、茂木大会はレース時間が1時間を超えるので、前フレームに比べ大きくなり居住性を上げています。また鈴鹿大会に比べてスピードがあまり出ないので、強度計算を再検討し軽量化を狙いました。