今週はベルコンの前後機構を含めた設計の最終調整をして、加工を少しずつ始めていきました。
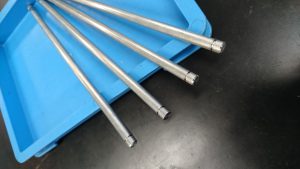
今回のベルコンの回転軸はEリングで固定するのでアルミ棒に溝を作る加工をしました。
旋盤に元々ついてあった刃先で加工するとEリングをうまく取り付けれないとのことだったので、室長に相談しながら弓鋸で溝を作りました。
今後はベルコンに関してはある程度設計が終わったので、3号機に搭載予定の子機の設計を本格的にしていこうと思います。(山田秦也君:電子機械工学科1年)

今週はベルコンの前後機構を含めた設計の最終調整をして、加工を少しずつ始めていきました。
今回のベルコンの回転軸はEリングで固定するのでアルミ棒に溝を作る加工をしました。
旋盤に元々ついてあった刃先で加工するとEリングをうまく取り付けれないとのことだったので、室長に相談しながら弓鋸で溝を作りました。
今後はベルコンに関してはある程度設計が終わったので、3号機に搭載予定の子機の設計を本格的にしていこうと思います。(山田秦也君:電子機械工学科1年)
フライス盤の端面出しの練習をしました。先輩に教えてもらってやりました。
手加工では無理な真っ直ぐな切断ができることが、驚きでした。
来週は材料への上手なケガキの練習をする予定です。(千葉 到君:電子機械工学科1年)
1号機に必要なタイヤを探していました。条件は立ち往生しない直径と20キロの重さに耐えられることです。しかし、条件に合う物はありませんでした。そこで、タイヤを設計して自作することになりました。(千葉 到君:電子機械工学科1年)

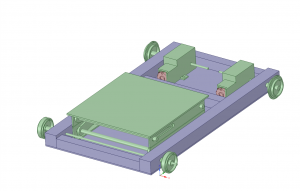
年末年始頃から加工をしていた新マシンが完成しました。前回のマシンとの相違点は、下記の3点です。
マシンとしては前回よりサイズは大きめになりました。しかしシャーシの肉抜き等を適切に行ったため、重量は約850g→約750gで軽量化に成功しました。(三村祐希也君:電子機械工学科2年)


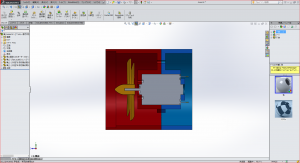
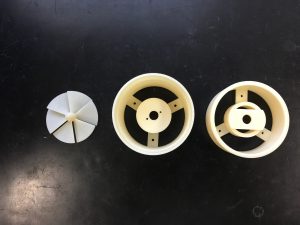
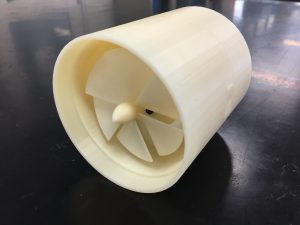
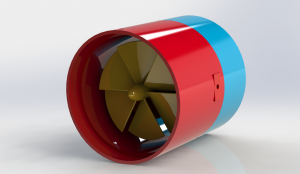
完成した3Dデータを大学の加工センターに依頼し、3Dプリンターで製作していただきました。実際に試したところ、風量に問題はありませんでした。この結果を元に、これから大会に向けてバード全体を完成させたいと考えています。(井堀幸祐君:電子機械工学科1年)
今週は子機の本体の設計をしていました。子機を動かすキャタピラ機構はタミヤのキットを用いる予定なので実際に部品を測りながら設計を進めてきました。来週はジャッキの上下機構に用いる部品の選定をしていこうと思っています。(山田秦也君:電子機械工学科1年)
先輩にトルクとスピードの計算方法を教えてもらいました。ロボットのトルクの計算のため、各部分の重さをはかりではかりました。スピードは話し合った結果、すごく早い必要はないと決まりました。また、1号機のフレームの柱を切って加工しました。(千葉 到君:電子機械工学科1年)

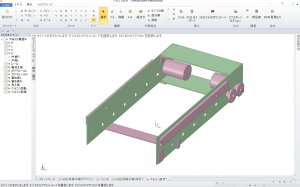
冬休みから1月にかけてエントリーシートに載せるデザイン図や担当している設計をしました。担当する設計は1,2号機に搭載するベルトコンベヤと、3号機の子機のジャッキを搭載したキャタピラ機です。
ベルトコンベヤは昨年の夏に作っていた試作機の改良版だったので、問題点を解消しながら設計をしました。
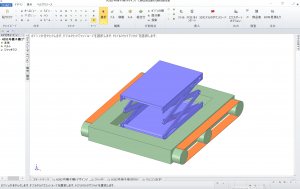
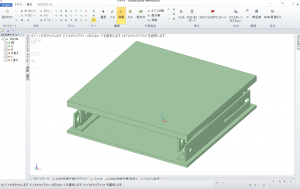
キャタピラ機は冬休みにデザイン図を作り、どれだけジャッキ板が上昇するか見るためのジャッキの試作を作りました。
今後はベルコンの設計図は作ったので加工担当の人に加工をお願いしてベルコンを完成していこうと思います。キャタピラ機はジャッキの試作を作ったので次はキャタピラ機本体の設計をしていこうと思います。(山田秦也君:電子機械工学科1年)