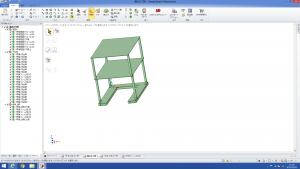
1号機の本体のフレームと板を設計しました。まず部品を作りました。それを図面上で組み立てて形どおりになるのか確認。一応フレームの部分はある程度完成したので良かったと思います。(千葉 到君:電子機械工学科1年)

1号機の本体のフレームと板を設計しました。まず部品を作りました。それを図面上で組み立てて形どおりになるのか確認。一応フレームの部分はある程度完成したので良かったと思います。(千葉 到君:電子機械工学科1年)
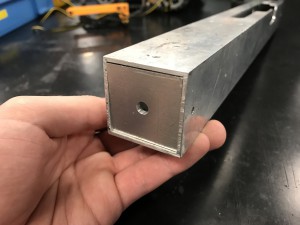
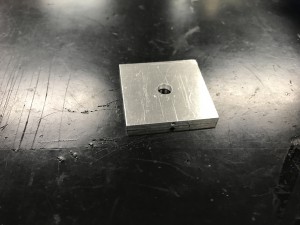
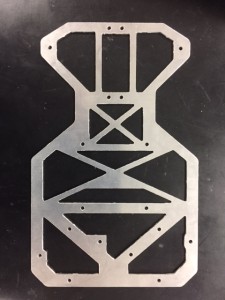
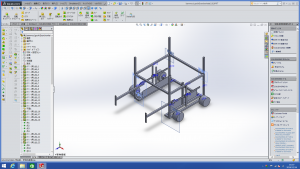
今日は文化祭以来の加工を始めました。内容はレスコンに提出するアームのパーツで、1枚目の画像のパーツです。このパーツは2枚目のようにロの字型のフレームにはめ込む様に使います。久しぶりのフライス盤だったので使い方等を先輩などに再確認してもらいながら加工していました。いよいよレスコンの機体作りが始まるのでこれからどんどん加工していきたいです。(門口祐也君:資産運用学科1年)
今週は、電光掲示版の文字のドット字作成とこれからの見通しを立てて、何が足りなくてどこを改善するかを把握していました。具体的には、レスコンに出場するマシンで電光掲示版が2つ必要になったので、2つ目の電光掲示盤のパーツを探しましたが同じものが見当たらないので、Arduinoを使用し新しく作るなどの想定もし、必要な部品をまとめていました。(松下詠一郎君:電気電子工学科2年)
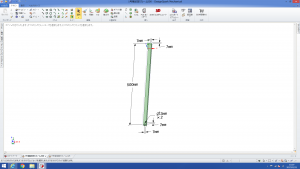
今まで、1号機の設計は担当ごとに違うソフトを使っていました。ソフトはソリッドワークスとデザインスパークです。
しかし、ソフトが違うと違う人が作った部品を合わせて組み立てができないと分かりました。そこで、ソフトをデザインスパークに統一することになりました。そのソフトでフレームの部分を設計しました。
明日は、本体の柱とそれを止めるための板の穴を設計しようと思っています。(千葉 到君:電子機械工学科1年)
ステアリングの方式はアッカーマンを作ったので、ちゃんとアッカーマン機構が出来ているか確認しました。(高橋 陸君:電子機械工学科1年)
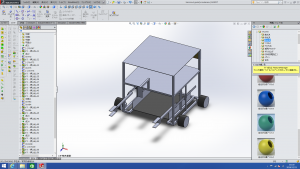
先週に続いて1号機のイメージ図を作っていました。そして、遂に一応イメージ図が完成しました。そこで、いろんなバリエーションを作りました。
アームを板を掴むことが出来る物に取り替えた図を作りました。ベルトコンベアを前方に展開した図を作りました。また、車体の裏側には電光掲示板に見立てた板を作りました。
これからは、実際に3DCADで設計するのに必要なアセンブリという部品の作り方を勉強しようと思っています。(千葉 到君:電子機械工学科1年)
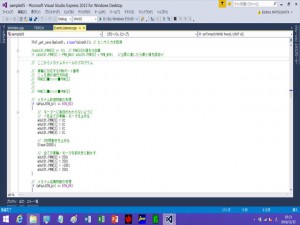
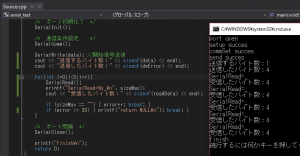
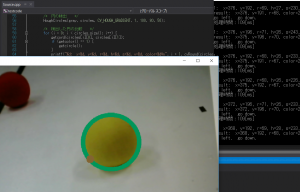
ラズパイの処理能力不足の対策として、PCで処理させる事になりました。ということで、画像処理をPCの方に移植し、ついでに処理時間も計測しました。
また、ロボットとは無線通信をしようと考えているので、そのプログラミングもしています。が、画像を見て分かるように、送受信したデータがおかしくなってます。今のところは原因が不明です。(漆原宏丞君:電子機械工学科1年)
先週に続いて、1号機のコンセプトシートに載せる為のイメージ図を作りました。
まず、全体のサイズのバランスがおかしい状態でした。そこで、バランスがつりあうように部品の長さを調整しました。
次にアームとそれを上下前後に動かす為のスライドレールを作りました。そして、ベルトコンベアを上下させるボールねじとそのガイド部分を作りました。最後にベルトコンベア本体を作りました。
先輩から大会で好成績を挙げているチームは機能ごとにそれを説明するイメージ図が有ると言われました。一応はもう少しで完成です。
完成したら細部を変更していろんなバリエーションのイメージ図を作りたいです。(千葉 到君:電子機械工学科1年)
私は大阪産業大学の大学祭イベントの内の一つである「ロボ闘」に出場しました。闘の文字が入っているとおり、ロボット同士の1VS1のバトルの大会で,トーナメント式です。同じ日に大阪電気通信大学が主催しているヒト型レスコンがあり、そちらの方に参加した人もいる為、参加者が分散し参加人数はそれほど多くはなかったです。ですが,会場ではバトル専門にロボットをやっている強者も居り,そのロボットとも戦えたため非常に良い経験になりました。私はこの大会で,3位という結果を残すことができました。(森下 英治君:情報学科1年)


メカナムホイールが正しく進むようになりました。前回のトラブルの原因は荷重のバランスではありませんでした。
僕以外の1年の子が原因を発見してくれました。原因は車輪の回転の向きが正しい向きと違っていた事でした。よく見れば違いが分かりました。
また、プログラム上でどの車輪にどの基板のポートが対応しているか分からないと言われました。そこで、分かる様にコメントを追加して欲しいと言われました。工夫して直感的に見て分かる様に図のあるコメントを入れました。(千葉 到君:電子機械工学科1年)