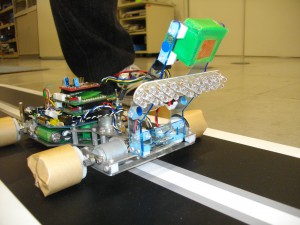
平均秒速2.8mくらいで安定して走れるようになったので、ベーシックマシンよりは速く走れます。外乱対策をしっかりやって、完走率を高めていきます。2月20日に科学技術高校で開催される技術交流会に参加を目指しています。(三村祐希也君:電子機械工学科1年)


平均秒速2.8mくらいで安定して走れるようになったので、ベーシックマシンよりは速く走れます。外乱対策をしっかりやって、完走率を高めていきます。2月20日に科学技術高校で開催される技術交流会に参加を目指しています。(三村祐希也君:電子機械工学科1年)
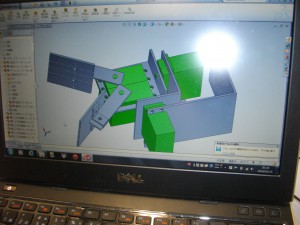
ガレキの下敷きになっているダミヤンを、救助するためのロボット。ガレキからダミヤンを守りつつ救助することを考えています。提出書類に載せるためのイメージ図を描いています。(西尾昌征君:機械工学科1年)


蛍光灯が当たるときと、当たらないときにセンサーの閾値を同じにして、データを正しくとれるか、テストしました。で直射日光に関しては、改めてデータを取ります。
(三村祐希也君:電子機械工学科1年)

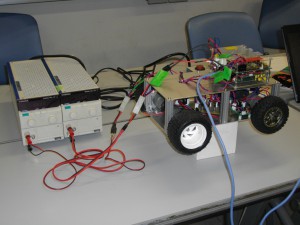
第16回レスキューロボットコンテスト応募書類を作成中です。オペレータの負担が減るようなシステムを考えています。具体的なシチュエーションを想定して、コンセプトに落とし込んでいます。(藤田 勝君:電子機械工学科2年)

サスペンションをつけて、振動を軽減します。TPIPボード3を搭載する予定ですが、TPIPボード3を使用した経験者がいないので、TPIPボード2を採用することも検討しています。(藤田 勝君:電子機械工学科2年)

第16回レスキューロボットコンテストに向けて、チームのレスキュー活動方針、ロボットに搭載する重要な機構や特徴をコンセプトに落とし込みました。今年の救助機はベルトコンベア形式にする予定です。