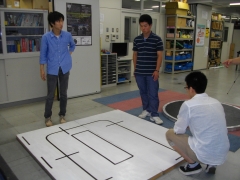
実際のフィールドは周囲に壁があります。今大会で宮本晋太朗君(機械工学科3年)のロボットが、壁にひっかかってしまいました。練習用フィールドも壁をつけて、大会の条件に近づけるようにします。


実際のフィールドは周囲に壁があります。今大会で宮本晋太朗君(機械工学科3年)のロボットが、壁にひっかかってしまいました。練習用フィールドも壁をつけて、大会の条件に近づけるようにします。
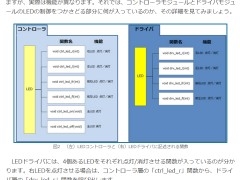
マイコンカーラリーのプログラムを、階層構造化で記述するために勉強しています。参考にしたのは、こちらのサイトです。階層構造を意識して、信頼性の高いプログラムを組もう! (藤江啓太君:電子機械工学科2年)

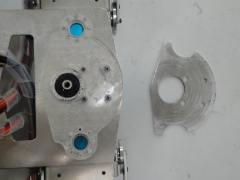
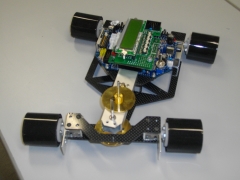
ギアボックスを作ったら、前後ギアのかみ合わせが悪かったです。穴の精度が出ていないようなので作り直しました。今度はいい感じです。(大西智之君:電子機械工学科2年)

マイコンカーラリーのプログラムをイチから作るために、開発環境をセットしました。プログラムの勉強のために、サンプルソースを手入力します。(藤江啓太君:電子機械工学科2年)


知能ロボコンプロジェクトの新リーダーが董 和也君(電子機械工学科2年)に決定しました。「ロボットを改良して、来年の大会では、今年より少し上に行けるように頑張りたいです」(董 和也君:電子機械工学科2年)