ライントレースの修正をし、アームの製作に取り掛かっています。来週に部品を発注します。(廣田晋也君:電子機械工学科2年)


高速型ロボットの設計を始めています。まだメモ描きの構想段階ですが、イメージを固めていこうと思っています。(西原琢也君:電子機械工学科2年)
クランクで脱輪しました。押して走らせた段階からおかしいと思っていました。アナログセンサの左側が壊れていて、クランクを曲がれませんでした。(藤江啓太君:電子機械工学科1年)

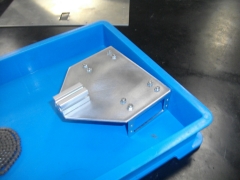
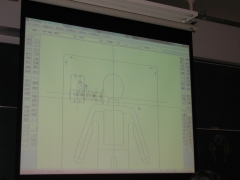
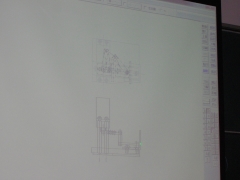
ダミヤンの首を保持する機構の設計をしました。L字のホルダーがスライドしてダミヤンの首を両側から固定します。(清家悠太郎君:電子機械工学科2年)
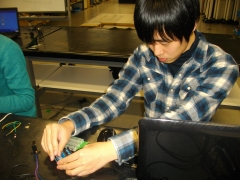
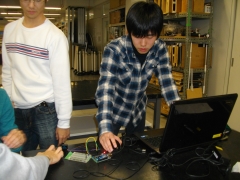
レスキューロボットが障害物を回避すれば、ロボットが壊れるのを防ぐことができます。そのために、障害物検知をするセンサーのテストをしました。具体的にはArduino基板にモーションセンサーをつけて、プログラムのテストをしました。赤外線センサーの前にモノがあると、LEDが消えます。(奥村優策君:電子機械工学科1年)
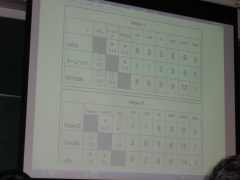
2月23日、パシフィコ横浜で富士ソフト株式会社が主催する全日本ロボットアメリカンフットボール プレ大会が開催されました。自由工房から「チームうどん」のメンバとして 参加してきました。プレ大会なので参加チームは6チームと少なかったです。リーグで2位となり、もうひとつのリーグと3位決定戦をして3位入賞しました。(西原琢也君:電子機械工学科2年)
ガレキ除去アームを設計中です。設計にあと2週間ほどかかる見込みで、3月中旬から加工を開始する予定です。(皷 悠介君:環境技術学科2年)