-
リンク
「プロジェクト」カテゴリーアーカイブ
マイコンカーラリーオープンセミナー
マイコンカーラリー常勝校の先生を講師にお招きし、オープンセミナーを開催しました。講演後は、今年初めての試走会を実施しました。詳しいレポートはコチラです。


マイコンカーラリーオープンセミナー
今年の5月30日に開催した「Basic Class基礎編」に引き続き、実務編のオープンセミナーを 実施しました。募集定員を大幅に超えた申込があったため、受講生枠を拡大して開催しました。実技と演習を伴う充実した内容のセミナーになりました。詳しいレポートはコチラです。

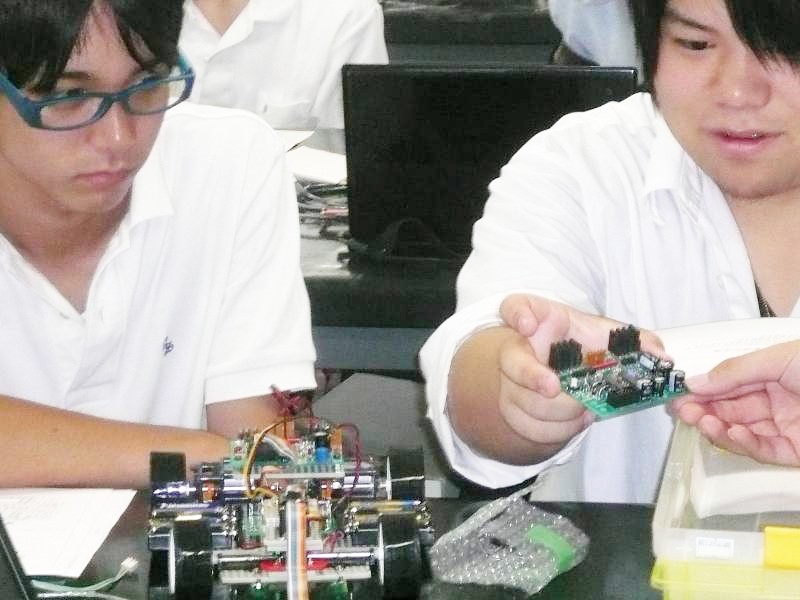
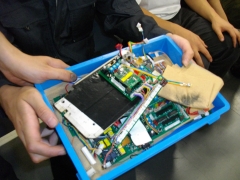
マイコン基板
平窪さんが、新しい中継基板と自作マイコン基板を作りました。これまで自作だったのを業者に頼んでパターンを起こしました。従来より安定性が増し、サイズが縮小されました。動作チェックも済んでいます。(山中拓也君:電子機械工学科2年)

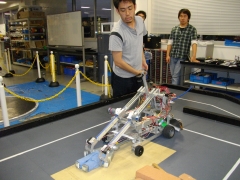
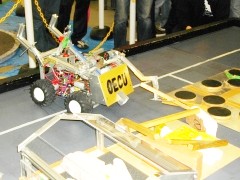
黒チーム:3号機
ガレキ除去専門機です。倒柱ガレキをクリアし、通路上やダミヤンの周囲のガレキを除去しサポートに徹しました。倒柱ガレキを上げるアームの形状を再考する必要がありそうです。

定例ミーティング
古川陽介君(制御機械工学専攻1年生)から、北海道の学会のお土産「白と黒の恋人」をいただきながらミーティングをしました。レスコンの黒チームが本番さながらに審判を置いて、3体のマシンを協働させガレキ除去、ダミヤン救助のデモンストレーションを行いました。

 高木先生からのメッセージ。
高木先生からのメッセージ。
レスコンのデモンストレーションは、今まで4年間やってきた中で、今の時期で一番スムースに動いていると思います。とてもいいですね。
競技会では、あれもこれもやりたいと考えたら、勝てません。どんな競技会でも、自分が理想とするロボットを作る人は多いです。しかし、大会ではいいロボットが優勝するわけではありません。最高の機構・理想のロボットを目指したら、たいがい優勝できません。なぜかというと、ピーキーなロボットは性能に起伏があって、安定動作ができないからです。勝利を目指すのであれば、確実に動くロボットを作って、安定したレベルで動かすことです。
そのためには、完成したマシンを何度も練習で動かし、性能を分析することが大切です。チェック表をつくって、トラブルが起きたところが一目で分かるようにしましょう。そうすれば、どこの動作に時間が掛かるのか、トラブルが起きやすい場所などマシンの弱点が判ります。
その表を元に、トラブル回避の対策を立てましょう。今から、特別な機構を追加するのではなく、弱点を回避する方法・補強のアイデアを見つけていくことが大切です。
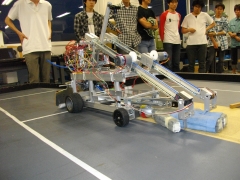
黒チーム:操縦練習
審判を2人置いて、3台のロボットを各オペレータが操縦して協働でダミヤン救助の練習をしました。現時点では、目視コントロールしていますが、1台が7分台でダミヤン救助に成功しています。




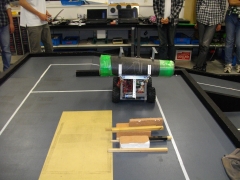
黒3号機:通路確保
ガレキの上にカバーを広げ、通路を確保する機能です。デモでは、うまく通路が広がりませんでした。操縦でガレキとの位置取りも必要だし、開くための機構を再検討する必要もありそうです。(高橋裕一朗君:情報工学科3年)
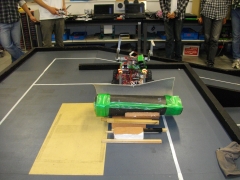
銀1号機:ダミヤン救助
上から2本のアームを伸ばしてダミヤンを確保。ダミヤンの上半身を持ち上げた下に、ベッドを差し込んで救助します。救助中に、片方のアームのケーブルが抜けてしまいました。対策が必要です。(齋藤佑一君:電子工学科4年)