


-
リンク
「プロジェクト」カテゴリーアーカイブ
ステアリングのパワーアップ
ステアリングのRCサーボをマクソンモータに換装しました。稼働チェックはしましたが、まだプログラムが対応していません。(石村仁志君:医療福祉工学科3年)

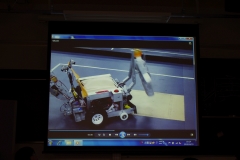
黒1号機:ビデオの編集作業
ビデオ審査の編集作業が、一通り終わりました。「平地走行」「ダミヤン救助」シーンを入れることが課題なので、そのあたりを工夫しました。(浦野蒼士君:電子機械工学科2年)
センサ基板量産
センサ基板の量産をし3枚作りました。以前のものと比較して、小型・軽量化しています。これから部品を発注して、実装にとりかかります。(和田貴大君:情報工学科3年)


黒3号機:重要機構テスト
先週できなかった2号機の重要機能が形になりました。筒状のプレートを投げると自動で展開して、ガレキの上に通路を作ります。自動展開するための仕組みを工夫しました。今後、素材の検討を行います。(高橋裕一朗君:情報工学科3年)


新リーダー就任
富田信君(電子機械工学科2年)が、ロボット相撲プロジェクトの新リーダーになりました。みんなで新リーダーを盛り立て、全国大会を目指しましょう!
富田信君からのメッセージ:「いろいろ至らないところがあると思いますが、全力で頑張りますのでよろしくお願いします」

定例ミーティング
春休みにペルーからレスキューロボットを学びに来た方から、差し入れにペルーのお菓子をいただきました。新メンバが入会し、賑やかなミーティングになりました。

高木先生からのメッセージ
ロボット製作にあたりアイデアも重要ですが、アイデア重視のロボットには大きな弱点があります。初めてやることが多いから、どうしても完成度が低くなることです。
面白いアイデアは評価されますが、得てしてアイデア倒れなります。着想が面白くても、ロボットは動かなくては意味がありません。完成したマシンは、すぐ完璧に動くわけではありません。動かないのが、当たり前です。
だから、アイデア重視のロボットの完成度を上げるためには、1日でも早くつくり何度も試走を繰り返すことが必要です。
ロボットの試走は、仲間内で動かすのではなくミーティング等の人前で動かしましょう。人前で動かすことは、緊張します。その緊張感が重要だからです。
緊張した時には、ヒューマンエラーもでてきます。マシンのバグ出しだけでなく、人のバグだしも事前に充分しておきましょう。早く作って何度も動かすことで、完成度が上がります。
初めてのことができなくてもいいんです。失敗して繰り返すことで、力がつきます。ロボット作りは実学です。モノを作り、自信と実績を身につけましょう。同じコトを繰り返す大切さを、自由工房の活動で学んでください。
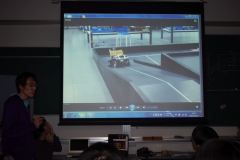
黒1号機:操縦練習
ロボットに搭載したカメラから送られてくる映像だけで、ダミヤンをスムースに救助できるよう操縦練習を重ねています。オペレータの訓練とともに、機体のバグ出しを行っていきます。 (浦中 雄太君:電子機械工学科2年)


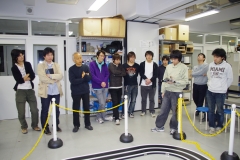
寝屋川説明会(1)
寝屋川キャンパスY号館502号室にて、自由工房新メンバ募集説明会を行いました。13人の参加者がありました。自由工房の趣旨説明の後、各プロジェクトメンバーが実際にロボットを動かし活動内容を説明しました。
自由工房は、単にロボットを作るだけではなく、試行錯誤をして仲間を作る場です。社会で通用する技術を身につける意欲のある人を、とことんやりたい応援していきます。ロボット経験者も未経験の人も大歓迎です。
活動は毎日行っています。自由工房に興味がある方は、いつでも工房に見学にいらしてください。次回の説明会は、5月11日(火)16:20〜に行います。





