
-
リンク
「プロジェクト」カテゴリーアーカイブ
子機のハンド
3号機の子機の腕を作成中。人間のように肩と腕・手首にあたる関節を持った新しい機構のハンドです。部品が揃えば来週中に、小さなピンチのようなハンドがつきます。(中島誠君:メディアコンピュータシステム学科3年)
精密バイスの活用
モータのシャフトにギアを差し込む時に、精密バイスを使ってます。ちゃんと固定して、まっすぐに力を加えないと、シャフトがゆがんでしまうので、慎重に作業します。。(古川陽介君:電子機械工学科3年)


定例ミーティング
元木悠介君(電子機械工学科3年)からカナダ土産のメイプルクッキーの差し入れがありました。美味しくいただきながら、各プロジェクトの進捗報告を行いました。前倒しやオンタイムで順調に進んでいると、開発した部品やマイコンを提示して、はきはきと報告できます。が、ちょっと遅れ気味だと、どうしても曖昧な報告になってしまいます。

室長:高木先生からメッセージ
プロジェクト内で、進捗が遅れている人がいたら、曖昧なままやり過ごしてはダメです。大会に間に合うようにスケジュールを考えたのだから、「なぜ遅れたのか?」理由をちゃんと考えましょう。
一人でロボットを作るのは大変だけど、人に指示を出して共同作業するのはもっと大変です。自分の能力だけが高くても、組織は動きません。良好な人間関係があってこそ、プロジェクトチームのパワーが発揮されます。
先輩は、後輩の進捗が悪い時にどう指導するのか考える責任があります。その経験は、社会に出て10年、20年後、役職についた時に活かされます。
怒るだけでは、人は動きません。人にやってもらう時には、指示を出す立場の人が、まずしっかりとやっていないといけない。自分を律して、前に進んでください。上級生には、頑張って欲しい。下級生が「@@さんが言ったことなら、間違いない」と、言われる先輩になって欲しい。自信を持って、頑張ってください。
歩行モーションの調整
腰が入ったパンチを打てるように、腰ヨー軸を追加しました。機体のバランスが変わり歩行が不安定になったので、歩行モーションの調整中。(石塚 拓也君:電子機械工学科1年)

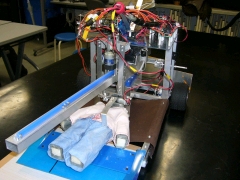
ダミヤン救出!
1号機は、定例ミーティングでダミヤン救出のデモンストレーションを披露しました。まだ、アームの可動部がスムースにいかなかったりするけれど、いい動きを見せてメンバーから感嘆の声があがりました。。(齋藤佑一君:電子工学科2年)
サーボ配線をコネクタ化
足のサーボが壊れやすいので、メンテナンス性を向上するために、サーボモーターの配線をコネクタ形式に改造中。ケースをフライスで削って、内部で凸部分も削り基板の位置も修正するので、ちょっと手間が掛かります。(森田 庸介君:医療福祉工学科3年)

マイコン基板 ver.1
マイコン基板の試作品ができました。サイズは前と同じですが、中央で2つに分割できるようにコネクタで繋いでいます。FETが壊れた時に基板の差し替えができるようユニット化しました。(平窪一貴君:電子工学科2年)

FET回路の改良
去年使っていたFET回路を、コンパクトかつメンテナンス性をアップするために改良しています。ちょっと不具合があるので、修正中です。(平窪一貴君:電子工学科2年)

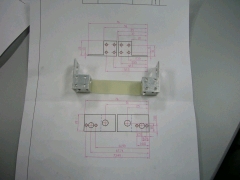
3号機の子機アーム設計
3号機は親子型ロボットになります。子機のアームを新規設計中。人間のような腕をつけたいと思っています。が、最初に考えた構造はうまく動かないことが判明しました・・・。早く気づいてよかったぁ! (中島誠君:メディアコンピュータシステム学科3年)
