
-
リンク
「プロジェクト」カテゴリーアーカイブ
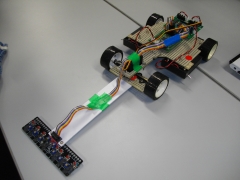
ベーシックマシン
CPUをR8にして走らせようとしたら、モータードライブ基板との相性が悪くて、右側しか回りません。新しいモータードライブ基板を作って載せたら走るようになりました。(藤江啓太君:電子機械工学科1年)
ヒト型レスキュー優勝
ヒト型レスキューロボットコンテストで優勝しました。調整ができていないチームが多く、救出できないロボットが大半でした。自分は、これまで先輩が作っていたモーションを活用できたので、有利でした。ポーズを作ることぐらいしかできないので、勉強しておきたいと思います。(近藤 吏君:電子機械工学科1年)


自主学習:トランジスタとFET
メンバー全員が電子機械の知識を持つように、自主学習をスタートしました。三原和也君(通信工学科3年)が課題を出して、2週間後にレポートを提出。代表2名がミーティング内で理解したことを発表します。
今回は「トランジスタとFETについて」、大西智之君(電子機械工学科1年)と高木裕一郎君(電子機械工学科1年)が発表しました。

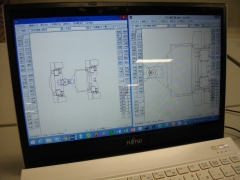
設計変更
「トレッドが206mmでは、クランクが曲がれない」と中井智貴さん(電子機械工学科4年)からアドバイスをいただいたので、ステアリング部分で11mm詰めました。基板が載っているシャーシーも10mm詰めて、トータルで21mm短くしました。(藤江啓太君:電子機械工学科1年)

サーボの支え板が割れた
先読みセンサーを支えているユニバーサルプレートが割れてしまいました。負荷が掛かるところなので、持ち上げるときなど気をつけて扱わないと壊れやすいと、注意を受けました。(大西智之君:電子機械工学科1年)

配列のプログラミング
配列の使い方を学ぶために、小文字を入力したら大文字に変換するプログラムを作りました。数字を入力すると、記号が表示されてしまいます。バグの原因と回避方法を調べています。(董 和也君:電子機械工学科1年)


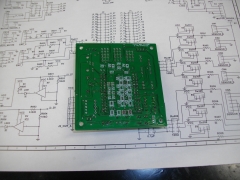
基板の換装
ロボットのホームポジションがおかしいので、基板を新しいものに変えて、動作確認をします。ケーブルが多いので、外したときに混乱しないように番号を振ってから作業にはいります。(近藤 吏君:電子機械工学科1年)


マシン設計
上下機構、足回り、配線のための穴などを設計しました。ダミヤンを救助するアームがまだできていません。サーボを小さくしたいので、新しいものを発注しました。サーボが届き次第、設計に入ります。スライドレーンは、いい素材を探しているところです。(清家悠太郎君:電子機械工学科2年)