

-
リンク
「プロジェクト」カテゴリーアーカイブ
予定変更
水曜日にプロジェクトミーティングを行いました。製作していた1号機のパーツがほとんど使えなくなりました。また、4機分作る予定だったのが、時間の関係上で3機分だけになりました。(鮫島智樹君:電子機械工学科2年)
スタートゲート
今のスタートゲートは作りがしっかりしていないので、電通大杯までに作り直したいと思います。材質も現在のエンビからベニア板もしくは、木などにして見た目もよくしたいと思います。(三原和也君:通信工学科2年)
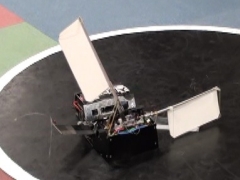
新型機構想
今のヤリ付きマシンの形を変更案を考えています。前カバーが絶壁の形を少し緩やかにしたいと思います。今までのブレードは気休め程度でしたが、新作はブレードをしっかりとつけたものに設計しています。2月までには設計図を終わらせる予定です。(阿部史和君:メディアコンピュータシステム学科2年)
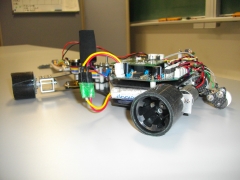
二輪制御
10月のテクノフェアまでは4輪マシンでしたが、今回は2輪にしました。モーターをマクソンに変えたので、2輪でもパワーが出るし加速度は上がります。マクソンで4輪だと重くなってしまうので、2輪にしています。今の重量812gなので800g切りたいと思っています。(三原和也君:通信工学科2年)

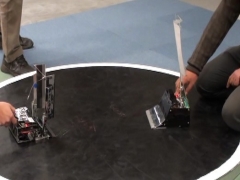
木嶋先生と練習会
全日本大会2連覇の木嶋先生をお招きし、練習会をしました。

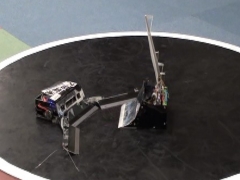
木嶋先生のロボット「六次元K」と初めて戦いました。本当に強かったです。こちらがどれだけ相手の角を狙おうとしても、必ず正面を向かれてしまいました。勝ちパターンが見えませんでした。どうやって攻めたらいいのかわからなかったです。
前にモーターを燃やしたことがあるので、モーターの定格について質問していろいろ教えていただきました。(阿部史和君:メディアコンピュータシステム学科2年)
最初の取り組みは「六次元K」のブレードが使いふるしだったので、角をすくえました。けれど2本めは、仕切りの置き場所をミスって横からすくわれてしまいました。そのあとは、自分のロボットが壊れてしまったので戦えず残念でした。
前から疑問に思っていた、タイヤが回転するときの押す力と土俵からの摩擦のちから、タイヤが摩耗しても変化する力などについて教えてもらえました。木嶋先生は、ロボットの性能を計算して設計する方なので、見習いたいです。(西原琢也君:電子機械工学科1年)
自分の考えている相撲ロボットで勝てるマシンとは、全く違いました。三豊とかなら相手を避ける対策とかあるのですが、木嶋先生には今のところ対策がありません。根本的なところから考えなおさなければならないと思います。「六次元K」の磁力について伺ったら、吸着力が6kgと言われて驚きました。(佐伯拓哉君:電子機械工学科1年)
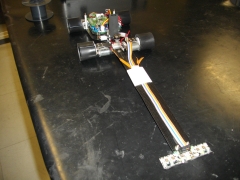
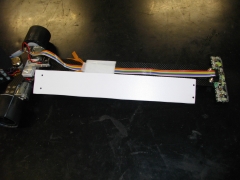
センサーアームを軽量化
センサーアームを中井智貴さん(電子機械工学科3年)からもらったカーボン製に交換しました。アームの長さが、以前と違うためプログラムの再調整が必要です。(大西祐喜君:通信工学科2年)