


-
リンク
「プロジェクト」カテゴリーアーカイブ
リセットの原因
ピニオンギアとギアの噛み合わせが悪く、通常よりも高い電流が流れているために、リセットトラブルが起きていると判明しました。(三原和也君:通信工学科1年)

定例ミーティング
レスコンプロジェクトがアイデアシートの発表を行いました。これまで培ってきた実績をリソースとし、よりいいものを作り上げていきます。マイコンカーラリーも、電通大杯に向けて頑張っています。


薦田先生からのメッセージ
マイコンカーラリーのマシンが走行中にリセットして、止まってしまうというトラブルが以前から報告されています。
こうしたトラブルは、もの作りにはつきものです。複雑なものになればなるほど、トラブルは起きます。トラブルは電気的にあわられるが、原因を突き詰めると機械的な要素にあることが多いので原因を追究してください。
今の様子を見ていると、トラブルが発生した現象しかみていません。リセットのように、たまにしか起こらない現象の解決は難しいです。
まず、原因の切り分けをしなくてはなりません。何度も走行させて、トラブルが発生した時のデータを取る必要があります。
コースの状況で発生するのか、走行距離によるのか、電池の状況が影響しているのか? いろいろ調べていく中で、トラブルの発生条件がわかれば、解決は近くなります。
共通条件がないのなら、また他のアプローチが必要となります。
機械は嘘は言わないから、正しい方法で原因を追究すれば、原因は見つかります。そのためには、設計を理解していなくてはなりません。
わからない部分があるのなら、知っている人に教わって理解してください。先輩がそういう経験を積んでいるのなら、問題解決のノウハウを教えてほしいです。
トラブルを解決しない限り、次のステップには進めません。一つ一つクリアすることで、知識やモノを考える力がつきます。トラブルはスキルアップのいいチャンスです。頑張って乗り越えてください。
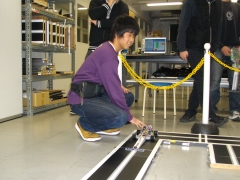
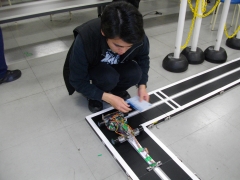
調整用コース
カーブとS字走行の検証のために、17mの長いコースを作りました。電通大杯に向けて、マシンの速度を上げて調整をしています。(安慶名将君:電子機械工学科3年)


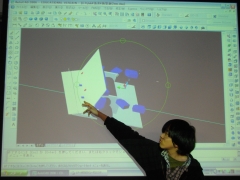
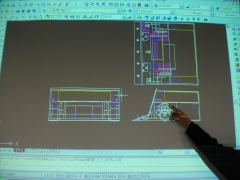
JRサーボのデータ
オリジナルロボットを設計する人のために、JRサーボの3DCAD図面を描いています。データを共有して、開発のスピードアップを図ります。(杉本大樹君:メディアコンピュータシステム学科1年)

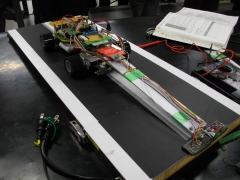
スタートセンサー
スタートバーセンサーにプログラムが対応していなかったので、修正しました。前に障害物がある間は静止していて、除くとスタートします。走行スピードは3.5m/sを目指しています。(安慶名将君:電子機械工学科3年)

新型クララの設計
新型クララの脚を設計中です。2月上旬には、ロボットを完成させて、春のイベントに出場したいです。(杉本大樹君:メディアコンピュータシステム学科1年)
新型マシン設計
大林尭史さん(電気電子工学科2年)の自立ロボットの設計中です。死角を作らないセンサの選択と配置を検討しています。林さんに相談しながら、センサ位置を決定していきます。(魚井成晃君:機械工学科2年)

