





-
リンク
月別アーカイブ: 2012年7月
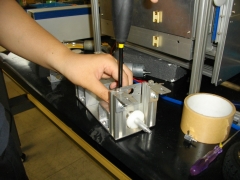
3号機:救助機構の試作
救助機構と搬送用ベッドが可動するように機構を見直しています。スペースが限られていて、ベッドの出し入れがやりづらい。スペースを有効活用するベッドの取り付けを考えます。みんなでアイデアを出しながら、一番いい方法を検討しています。(田中 亮君:電子機械工学科2年)

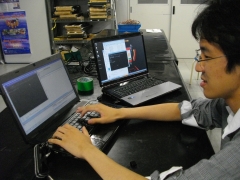
LAN
ロボットを操縦している4台PCが、メインPCに情報を送れるようなシステムを作成しています。これが完成すると画像処理を1台のマシンでできるようになります。ダミヤンの胸マーカー認識や音声認識を、メインでできるようになるため、オペレータの負担が軽減されます。(中村祐一君:電子機械工学科3年)
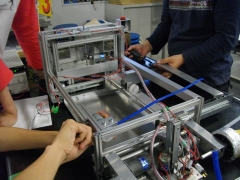
ホイール周りの板金
ロボット側面の板金加工中。穴あけをして、板の端面にポンチを打ちました。この後、ドリルで端面にネジ穴をあけます。(佐伯拓哉君:電子機械工学科1年)


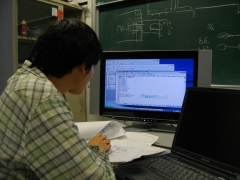
プログラム講習会
7月中旬に相撲プロジェクト内でプログラム講習会を実施するので、その資料を作っています。内容は相撲ロボットの基本性能と基板の働きの解説。プログラム的には、タイマー関数の使い方、デフォルトの戦術を利用、センサの処理を実習中心で進めます。(魚井成晃君:機械工学科3年)

バッテリー管理
チーム全体で25本のバッテリーがあります。満充電にするに2時間かかります。ちなみに4台のロボットが可動すると14本のバッテリーを使います。ロボットを確実に動かすためにも、バッテリー管理を厳重にしておく必要があります。(鮫島智樹君:電子機械工学科2年)

坂道センサの配置
センサアームの根元に、坂道センサを搭載しました。坂が急坂ではないので、あまりアームが動かないので、調整が難しいです。これから坂道センサのプログラムを組んで、来週にはテストをします。(大西祐喜君:通信工学科2年)

チップ完成
武器のチップを作りました。ちょっと穴位置に問題があるかもしれませんが、取り付けは可能です。試合までには、精度を上げておきたいです。(阿部史和君:メディアコンピュータシステム学科2年)
