-
リンク
月別アーカイブ: 2013年7月
センサーアームの作り直し
自由工房のプロモーションビデオに映っている自分のマシンをみたら、走行中にセンサーアームが跳ね上がっていることに気づきました。素材の弾性が大きいためです。今のままではセンサー値を読み取れないので、カーボンで作り直します。(三原和也君:通信工学科3年)


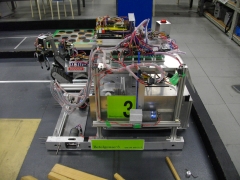
2号機:本選までの課題
本選ではダミヤンが3体になるので、3号機にも救助機構の製作をします。それによって、タイヤの位置を調整が必要になります。その時に、タイヤのサイズを大きくして走行スピードをアップするようにします。(鼓 悠介君:環境技術学科2年)

カテゴリー: 活動報告
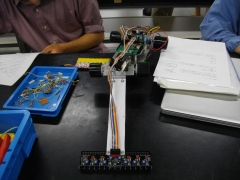
1号機:本選までの課題
連結アームのモータとギアを選定し、持ち上げ機構を製作します。実際にロボットを動かしてみたら、アームの開く角度が足りなかったので、改良します。ダミヤン救助もできるようにしていきます。(田中 亮君:電子機械工学科3年)

カテゴリー: 活動報告
サンプルモーション
1年生の組み立てたロボットが、サンプルモーションで歩きませんでした。サンプルが動かないということは、組み立てに問題があります。ロボットを確認したら、太ももフレームの取り付け方を間違えていました。(三谷峻生君:メディアコンピュータシステム学科2年)


メンテナンス性の改善
これまでナットで止めていたのを、板をねじ切りして、ネジだけで止めれるようにしました。メンテナンス性が向上しました。来週は、エンコーダーにゴムをつけて、走行中の揺れを防ぐようにします(目黒隼人君:機械工学科4年)
サーボの温度チェック
自分で歩行モーションを作っています。サーボの温度が上がりすぎないように温度をチェックしながら、モーションを作っています。(大野拓美君:情報学科1年)