救助用のアームを設計中です。シンプルな機構で、ダミヤンの上にある棒ガレキを除去するアームです。来週までに完成予定です。(清家悠太郎君:電子機械工学科2年)


救助用のアームを設計中です。シンプルな機構で、ダミヤンの上にある棒ガレキを除去するアームです。来週までに完成予定です。(清家悠太郎君:電子機械工学科2年)
ロボットフォースのロボファイト14に申し込みをしました。8月4日の大会に参戦します! 80機の二足歩行ロボットが集合するということで、楽しみです。会場は、大阪工業技術専門学校。入場無料です。応援に来てください。

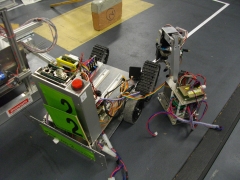
組み立てをしたのですが、左太もものピッチと左ひざのピッチを間違えて配線してしまいました。ロボットにホームポジションをとらせようとして気づきました。今、修正中です。(藤原庸平君:情報学科1年)
10日までにパーツの発注を行います。モーターと軸が届きしだい、動力部分を改良していきます。ガレキ除去アームも作り7月下旬までに、ロボットを完成させ練習を積みます。(清家悠太郎君:電子機械工学科2年)

自由工房のプロモーションビデオに映っている自分のマシンをみたら、走行中にセンサーアームが跳ね上がっていることに気づきました。素材の弾性が大きいためです。今のままではセンサー値を読み取れないので、カーボンで作り直します。(三原和也君:通信工学科3年)


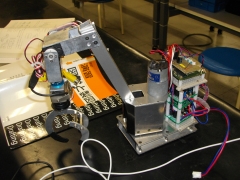
本選ではダミヤンが3体になるので、3号機にも救助機構の製作をします。それによって、タイヤの位置を調整が必要になります。その時に、タイヤのサイズを大きくして走行スピードをアップするようにします。(鼓 悠介君:環境技術学科2年)
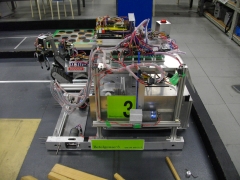

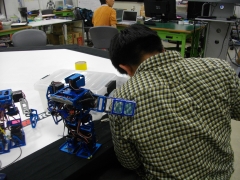
連結アームのモータとギアを選定し、持ち上げ機構を製作します。実際にロボットを動かしてみたら、アームの開く角度が足りなかったので、改良します。ダミヤン救助もできるようにしていきます。(田中 亮君:電子機械工学科3年)