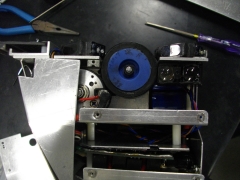
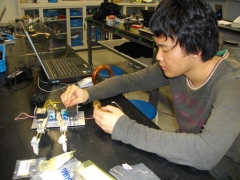
設計図どおりに車輪のギアが組めるか、実機で検討中です。今のところ問題はなさそうです。(鮫島智樹君:電子機械工学科2年)

第2回目の新メンバー募集説明会を、四条畷でも実施しました。寝屋川からも上殿泰生君(機械工学科3年)がきて、全体の説明をしました。ヒト型プロジェクトは、実際にロボットを動かして活動を分かりやすく説明しました。


寝屋川の自由工房説明会へ、新入生5人が見学に来てくれました。真剣に説明を聞いてくれて、自分のやりたいことをを見つけられたようです。全員がプロジェクトに参加表明してくれました。今年は積極的な1年生が多いので、期待できます。まだ募集しているので、いつでも気軽に見学に来てください!
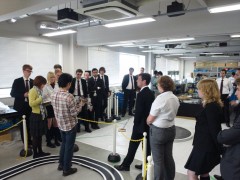
Twente大学(オランダ)から自由工房の視察に学生25名がいらっしゃいました。動いているロボットに対して、興味を持っていただけたようです。





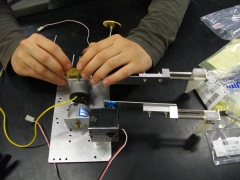
組立てたのですが、基板に不良があって走らせることができません。来週には原因を突き詰めて解消し、オーバルコースを走らせます。(大西祐喜君:通信工学科2年)
TPIP2ボードは11個までしかモーターを制御できません。CACS制御回路は、TPIP2ボードから出ている信号をまとめることで、モジュール化したブロックにデータを配信します。これにより、理論的にほぼ無制限にモーターを制御できるようになります。(中村祐一君:電子機械工学科3年)