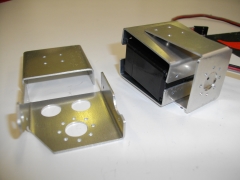
板金加工が終了したので、本体の仮組みをしました。ギアのかみ合わせなどをチェックした後に、基板の搭載をします。(阿部史和君:メディアコンピュータシステム学科1年)



板金加工が終了したので、本体の仮組みをしました。ギアのかみ合わせなどをチェックした後に、基板の搭載をします。(阿部史和君:メディアコンピュータシステム学科1年)
ロボットが組みあがったので、いよいよモーション作成です。清家拓也さん(メディアコンピュータシステム学科3年)にドライバのインストールから教えていただきました。(川口智大君:メディアコンピュータシステム学科1年)


連続したR450カーブ(写真中央の円周)の揺り返しを安定させるように、プログラムを調整しました。その結果、スネークラインの走行が安定してきました。(三原和也君:通信工学科1年)


薦田室長がいらっしゃらないので、上殿泰生君(機械工学科2年)の司会でミーティングを行いました。
機械班から、機械使用後の点検の報告がありました。作業後に工作機械の周囲に切子が残っていたり、工作台周囲の掃除が徹底されていません。以前より、少しずつよくなっていますが、お互いもっと気を配ってください。


クララの腕を自作化するべく板金加工中です。クララはベースがRobovie-xですが、少しずつパーツを作り、自作ロボットに変貌中。今のところ、自作率は5割です。(杉本大樹君:メディアコンピュータシステム学科1年)

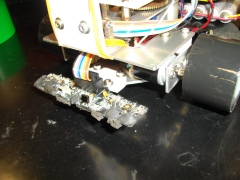
先読みセンサの下にポジションセンサを搭載しました。横滑りを検出し、カーブでマシンが外に膨らんだ時に、ブレーキをかけてハンドルを切り軌道を補正します。今は、スピードを落とさないと安定走行できないので、今後、スピードを上げても対応できるように調整していきます。(中井智貴君:電子機械工学科2年)

12月3日に、先輩にマシンをチェックしてもらうので、一度機体を全部バラして組立て調整しました。シャーシーが曲がっている部分を見つけました。(魚井成晃君:機械工学科2年)

練習会に向けてロボットのメンテナンスを進めてきましたが、PCが修理から返ってこないのでモーションの作りこみができず、困っています。(渡辺 颯君:メディアコンピュータシステム学科1年)