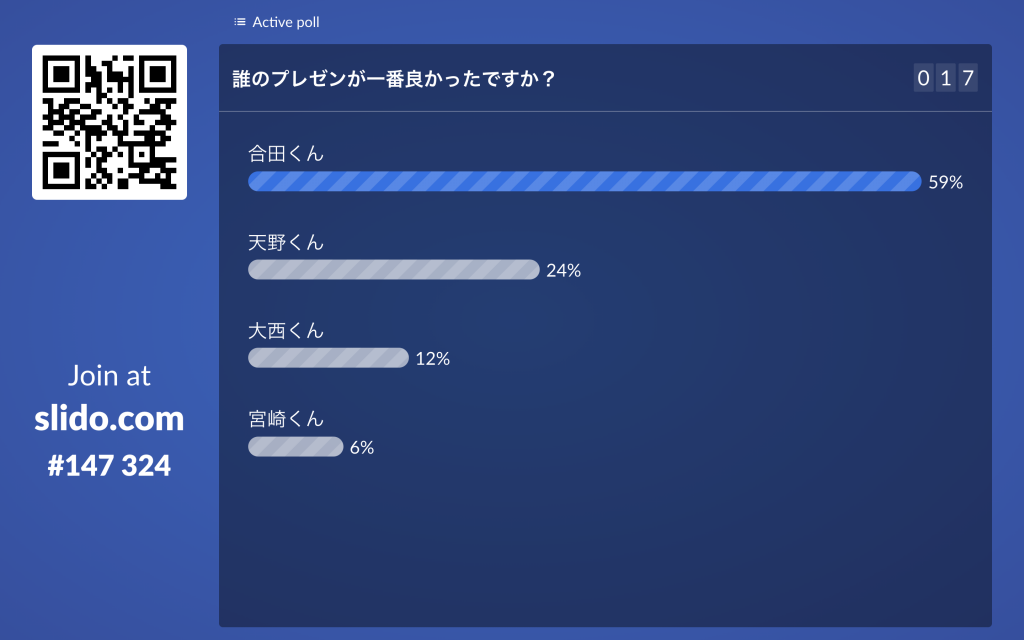
予定していたライントレーサーの部内大会を6月25日に行いました。新型コロナ感染防止のためみんなで集まってすることはできませんでしたが自分の機体についてプレゼンしてもらい誰の発表が良かったかを投票してもらうという形式にし皆さんが楽しめるような工夫をしました。結果はタイム、プレゼンともに合田くんが優勝となりました。おめでとうございます。他の皆さんも色々な工夫があってとてもいい走りでした。皆さんお疲れ様でした。

予定していたライントレーサーの部内大会を6月25日に行いました。新型コロナ感染防止のためみんなで集まってすることはできませんでしたが自分の機体についてプレゼンしてもらい誰の発表が良かったかを投票してもらうという形式にし皆さんが楽しめるような工夫をしました。結果はタイム、プレゼンともに合田くんが優勝となりました。おめでとうございます。他の皆さんも色々な工夫があってとてもいい走りでした。皆さんお疲れ様でした。
更新が遅れてしまい申し訳ありません。救命ゴリラ!!∀チームです。
徐々に機体のパーツができあがってきました。
下の写真は、1号機シーカーの足回りのタイヤの試作が完成した時のものです。



先日、レスコン2021に向けてのスタートアップミーテイングが行われました。これは、今年はコロナの影響で、大会の予選がなくなってしまい、本選のみとなってしまったので開催されました。内容は各チームの現状の製作状況の報告です。

マイクロマウス3回の合田です!
現在、知能ロボットプロジェクトが主催をする自由工房内のトレース大会に出場しようと考えています!
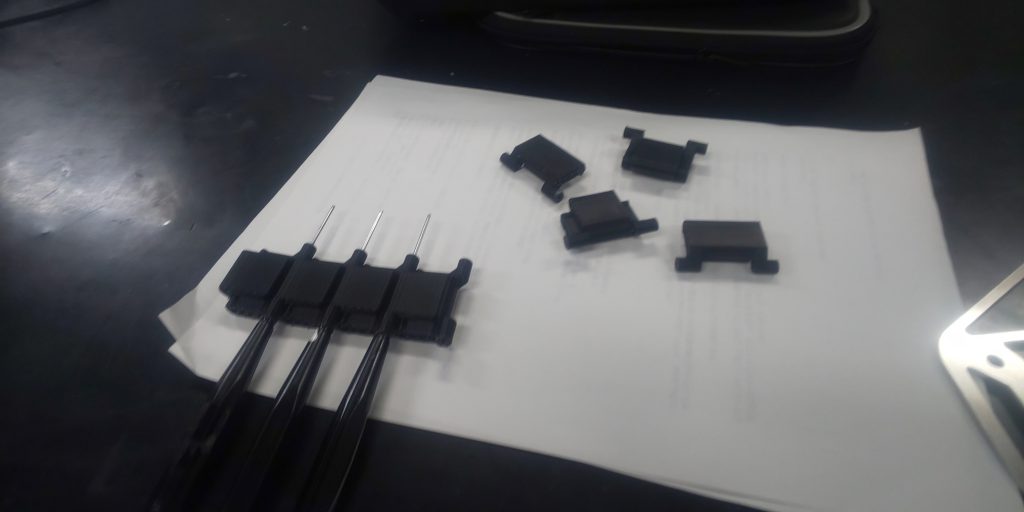
機体は以前から使用している「てくてくねずみ3」を改造し、ライントレースができるようにします。
できあがった機体はこんな感じです! 突貫で作成したので取り付けが甘いです。時間があれば変更しようかなとは思っています。(3枚目は変更前のてくてくねずみ3です。)



マイクロマウス3回の合田です!
自作マウスの進捗を報告します!
今回は、以前から気になっていたセンサーまわりの回路がうまく動くのかどうかの確認をしました。
やり方としてはブレッドボード上で回路を作成し、Pi-Co3に使われているRX-631ボードでセンサーが動いているのかを確認します。
結果としてはうまく出来ませんでした。ブレッドボード上でミスをしているのか、そもそも回路図から間違えているのかはまだわかりません。
はやく原因を究明して回路図を完成させてしまいたいです!

6月7日(月)に鈴鹿サーキットでソーラーカーレースの走行会を行いました。
無事にサーキットのコースを走りきることができました!




これから7月末のソーラーカー本線に向けて活動していきます!!
知能ロボコンがコロナの影響により去年に引き続き延期となってしまいました。大会の延期や中止が続きモチベーションが維持しにくい状況が続いていたため自分たちで部内大会を開催することになりました。競技内容はライントレーサーを使い誰が一番速くコースを走りきれるかを競います。またタイムだけでなく各個人の機体についてプレゼンを行い誰が一番上手く発表できるかを投票で決めます。コースは過去のロボトレースのコースをプラスチックダンボールで再現しタイムの計測器も自作しました。最速目指して頑張ります!

マイクロマウス3回の合田です!
自作マウスの進捗具合を報告します!
今回は足回りの部品を購入しました!ですが、調査不足で予想していたようになりませんでした。悔しいです。次はきちんと調べてから購入しようと思います。


マイクロマウス3回の合田です!今回からは自分の自作マウスの作成の進捗をご紹介します!
回路図はこのようにしようと思います!
センサーの部分などが心配なので変更するかもしれませんが、大きくは完成にします。
次は基板に起こしていきたいと思います。

遅れてしまいすみません。。。お待たせしました。Reチームの進捗です。
一号機、参号機ともに活動時間の制限される中、懸命に確実に製作しています。今後もご期待ください!