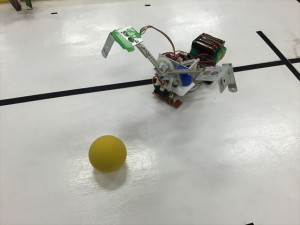
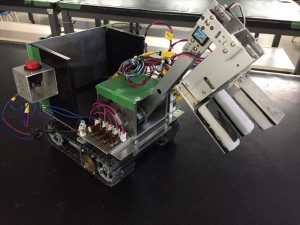
ライントレースカーに距離センサーを付け、ボールを見つけることができるようになりました。適切な距離に近づき、アームを動かしてボールを取るプログラムを書きました。しかし、取ったボールが競技台にこすれてしまうのでハードの改良をしていきます。(二瓶悠介君:電子機械工学科1年)

ライントレースカーに距離センサーを付け、ボールを見つけることができるようになりました。適切な距離に近づき、アームを動かしてボールを取るプログラムを書きました。しかし、取ったボールが競技台にこすれてしまうのでハードの改良をしていきます。(二瓶悠介君:電子機械工学科1年)
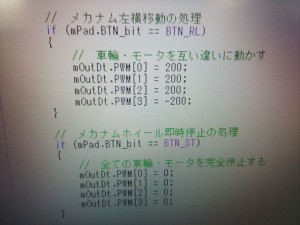
メカナムホイールの試作機を実際に動かせるかテストしました。
なぜか4輪駆動の内の3輪しか動かないトラブルが起きました。
原因は、プログラム上で1番から順番に車輪への出力をしているつもりでプログラムを書いたことです。コンピューターは1からではなく0から順番にカウントしているのが原因でした。そのため、自分が思っている出力が1つずつずれていました。最後の出力が対応する車輪が動いていませんでした。
また、動いている車輪をボタン1つで全て停止させるプログラムを追加しました。これで全ての車輪が動くようになりました。しかし、実際に動かしてみると新たに問題が発生しました。
真っ直ぐ前後に移動できません。車輪が空回りして真横にも上手く進めないということもわかりました。原因は荷重や重心のバランスが偏っていることだと考えています。
今後はプログラム上で調整をしたりして上手く動く事を実現したいです。(千葉 到君:電子機械工学科1年)
エンコーダーの制御をやりました。A相を基準として見ることで正転か逆転を読み取っています。これをしっかり理解して三輪移動で自己位置推定がしっかり出来るようにしていきます。(前田直樹君:電子機械工学科1年)

今回は、一番大きく映ってるボールの中心座標と指定座標(今回は画像の中心)を比較してボールの中心座標をどう動かせば指定座標と重なるかを出力させました。
また、処理時間を少しでも短縮するためにしきい値を調節して、検出数を減らしました。検出数が1個になるようにしても良かったのですが、誤検出した時や、検出できなくなったときに困るかもしれないので、そこまで厳しくはしていません。
※「result」ウィンドウの真ん中当たりの青っぽい四角の中が比較に使った範囲です。実際にロボットで動かす時にピッタリ重なるようにするのは難しいので範囲をつけて、判定を少し緩くしています。(漆原宏丞君:電子機械工学科1年)


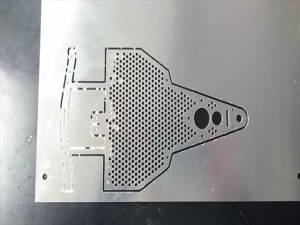
他のメンバーに頼まれ、テクノフェアで展示するためのガレキ撤去ロボットの部品を作りました。
ある程度加工されている部品があり、ポンチで目印を打ちました。ボール盤で指定された場所に穴を開けるとき、小さな部品なので、ドリルに巻き込まれて部品が飛んでいかないように気をつけました。(千葉 到君:電子機械工学科1年)

来年の大会に向けて、どんなロボットを作るか構想を練っています。今は2号機をどんな風にしたいか考えています。条件としては家ガレキを支えるジャッキがあることです。
しかし、僕が考えたロボットでは上手く行かないということが分かりました。僕の考えたジャッキでは家の重みに耐えられないと言われました。
さらに、僕が考えた物と違い一台で全てのレスキュー活動が出来る万能型ロボットでなければいけないと言われました。まだ、来週まで考える時間があるのでゆっくりと納得できる構想を考えたいです。(千葉 到君:電子機械工学科1年)

テクノフェアに向けて作っていたロボットが無事に完成し、テクノフェアでの展示もトラブルなくできていました。来場客の方々に動かしてもらったりもしたのですが、こちらの希望通りの動きをしてくれました。これからは、レスコンの本戦に使うロボットを考えながらこのロボットも改造を加えて本戦に使えたらいいなと思っています。(門口祐也君:資産運用学科1年)
前回たてた目標を変更して、まずは自分に一番近い、つまり一番大きく写っているボールの検出を試しました。
画像のように、一番大きく写っている(各画像の下の方に書かれているrの値が一番大きい)ボールが検出できています。誤検出も多少ありますが、今のところは問題なく処理できています。
次は、検出したボールを回収するために、ボールが指定座標とどれだけ離れているか、また上下左右どの方向に動けば合わせられるかの処理をさせたいと思います。(漆原宏丞君:電子機械工学科1年)


CNC加工の準備ができたので、加工を開始しました。11月の初めに、連休があったのでメインシャーシの加工を行いました。残りは、小さなパーツが多いので平日に少しずつ進めていきます。(三村祐希也君:電子機械工学科2年)

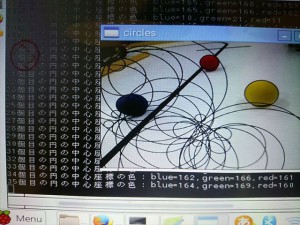
前回の画像をPCでのディスプレイに表示させて、それをラズベリーパイ(今後はラズパイと呼びます)に繋いだusbカメラで読み込み、円検出をさせました。が、動画になるのでデータは無し。結果はちゃんと動きました。ですが、一枚目画像を見て分かるように、黒い円が30個以上検出されています。これのせいで、前のusbカメラの処理がとても重かったです。なお、この画像で使用したのは静止画です。この検出結果を出力するだけでも10秒近くかかっていました。
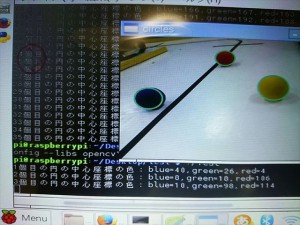
それを、しきい値をいじって調整したものが二枚目の画像です。ちゃんとボールだけが検出できています(緑の円がそれです)。
次に、検出できた円の中心座標の色を取得するようにプログラムを書き換えました。画像を見て分かるように、検出した円の中心座標の色も取得できました。
次の目標は、これをusbカメラの映像を使って使えるレベルで動くように改良する事と、各色のボールが、画像の中にいくつあるかをカウントする所までを考えています。(漆原宏丞君:電子機械工学科1年)