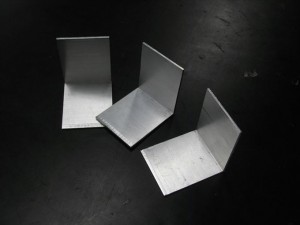
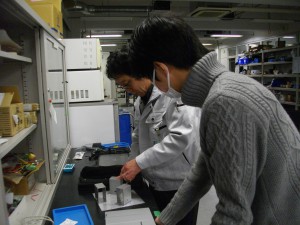
発注していた部材が届きました。穴を開けて、モーターを取り付けられるように加工します。(西尾昌征君:機械工学科1年)


モーターを取り付けるためのL字金具を糸鋸とフライス盤で手加工しました。そのままだと精度が出ていなくて、穴あけの位置を決められないので、左右を削って直角をだします。(西尾昌征君:機械工学科1年)


レーンチェンジの時に車体が振られてしまい、その後の走行が安定しませんでした。
ハンドルを切った後の、左右モーター回転のバランスを調整してスムースに曲がるようにプログラムを調整しました。(三村祐希也君:電子機械工学科1年)


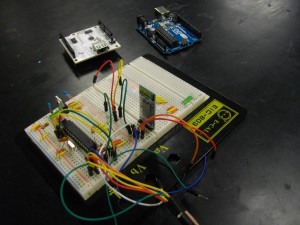
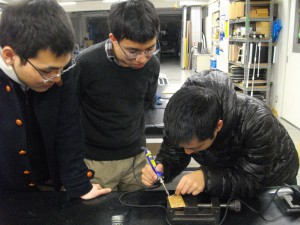
ちゃんと動く基板を作るためには、ハンダ付けの技術が必要です。その前に、正しい道具の使い方を知っておく必要があります。道具の手入れ次第でもロボットの性能に影響がでます!(三村祐希也君:電子機械工学科1年)
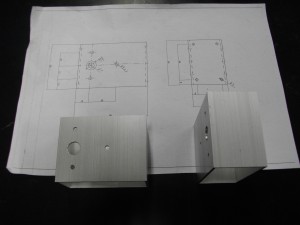
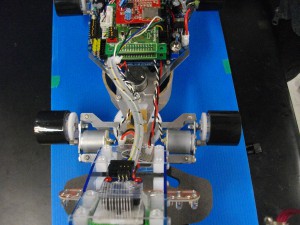
ドリルの穴が少し大きくて、ガタが出ていました。アルミホイルを2重にしてベアリングと部材の圧入していれました。とりあえずの修正ですが、効果が出ているようです。ブレーキのタイミングを修正して、カーブの走行が安定しました。(三村祐希也君:電子機械工学科1年)

第7期生の自由工房修了式&追い出しコンパを行いました。薦田室長から挨拶をいただいたあと、修了証書の授与式をしました。修了者から後輩にむけて一言ずつメッセージをいただきました。