レスコンプロジェクトの新リーダー高木裕一郎君(電子機械工学科2年)に決定しました。「来年のレスキューロボットコンテストでは、工学大賞を狙えるように頑張ります」メンバーも先輩も、新リーダーを助けてロボットを作りましょう。(高木裕一郎君:電子機械工学科2年)


レスコンプロジェクトの新リーダー高木裕一郎君(電子機械工学科2年)に決定しました。「来年のレスキューロボットコンテストでは、工学大賞を狙えるように頑張ります」メンバーも先輩も、新リーダーを助けてロボットを作りましょう。(高木裕一郎君:電子機械工学科2年)
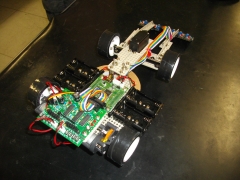
自由工房にあるベーシックマイコンカーが壊れていたので、新しく作りました。高校時代は、先生に頼ってプログラムをしていたので、一から自分で理解して作ってみます。高校生に質問されたときに答えられるようになりたいです。(藤江啓太君:電子機械工学科2年)
はさみを改良し、軽量化しつつ剛性を高めました。学生リーグに向けてロボットの再調整をしています。(三谷峻生君:メディアコンピュータシステム学科3年)

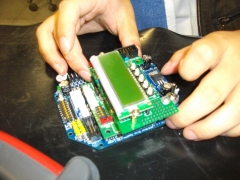
新型機は走行ログを取るためにマイクロSDを搭載しました。液晶画面とスイッチで、簡易的にプログラムを変更できるようにします。(大西智之君:電子機械工学科2年)

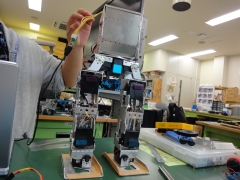
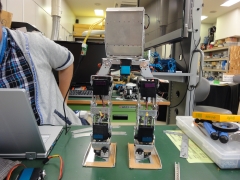
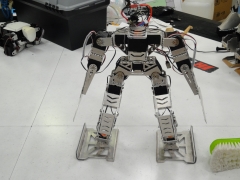
足や腕の形状を変更し、ボディが完成ました。一通りのモーションを再生できるようになりました。具体的には、前進、旋回、横移動や起き上がり、攻撃モーションなどです。7月6日の学生リーグに向けロボットやモーションを調整してゆきます。(河端 一紘君:電子機械工学科1年)

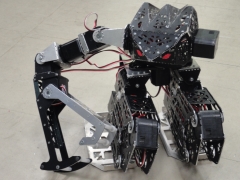
腕は、ほぼ全ての工程が終了しました。腕を胴体兼頭部へ装着したら、いよいよモーション作りです。このロボットの特徴は、ハイトルクを積んだ巨大な鋏です。重量制限があるため、片腕のみになります。(三谷峻生君:メディアコンピュータシステム学科3年)


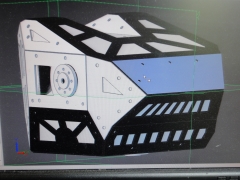
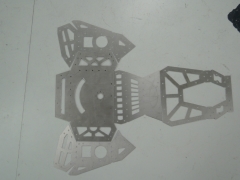
胴体兼頭部のパーツを製作しました。残りの工程としては、塗装、曲げ加工があります。パーツが揃ったら、組み立ててモーション作成にはいります。(三谷峻生君:メディアコンピュータシステム学科3年)
腕を除くほぼすべての製作工程が終了しました。腕パーツの設計も完了しているので、パーツ作製に取り掛かります。平行してモーションを作っています。(大野拓美君:情報学科2年)