





-
リンク
「プロジェクト」カテゴリーアーカイブ
改良
スイッチの場所を変えました。タイヤのスポンジを4mmだったのを3mmにして、タイヤの直径を小さくしました。坂道でボディを擦らないかの車検チェックは通っています。(三原和也君:通信工学科2年)

スピードアップ
モーターをマクソンに変更し、電池をパック化しました。スピードアップしたので、カーブの先読みができるようにセンサーアームを伸ばしました。カーブでの機体制御が特殊なので、コーナーリングがきれいにできるようにプログラムを調整しています。(鹿島健吾君:電子機械工学科3年)


ロボット制御理論
ロボコンマガジン2011年05月号に掲載されている木嶋先生の「第22回全日本ロボット相撲大会 自律式「六次元K」〜運動解析から始めるロボット設計手法」を参照して、自分が設計する相撲ロボットに要求される性能を検討しています。(西原琢也君:電子機械工学科1年)
全日本ロボット相撲全国大会
全日本ロボット相撲全国大会に参加しました。結果からいうと、1回戦敗退でした。
対戦相手は、大分県立国東高等学校の裏黒津崎でした。試合内容は、1本目は引き、相手の様子を見て隙をついて先取しました。しかし2本目は攻めたところ、相手のブレードに乗り上げてしまい、その上にあった超硬チップに当たりそのまま土俵下に刃先から落ちてしまいました。その時にブレードが欠けてしまい反則を取られて負けました。
昨年も全国大会に参加しました。しかしながら、準備不足で負けてしまいました。今年は去年の経験を活かし自分の準備不足のせいで負けませんでしたが、作戦のツメが甘くブレード破損で負けてしまいました。
来年の大会は、作戦を事前にしっかりと立てて試合に望みたいと思います。(池田紘彰君:電子機械工学科2年)


白線認識
センサを搭載し、配線が終了してプログラムができるようになりました。白線センサが反応しているときに音が鳴るようにしました。土俵の傷を白線とご認識しないように、認識時間を設けています。(西原琢也君:電子機械工学科1年)

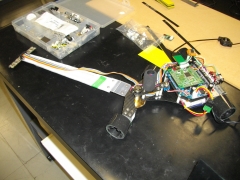
エンコーダーの取り付け
エンコーダーが片持ちだったので、走行中に抜けてしまう恐れがありました。そこで、両持ちに変更しました。(大西祐喜君:通信工学科2年)

