




-
リンク
月別アーカイブ: 2010年6月
定時ミーティング
各プロジェクトの作業報告と、オープンセミナーの進行確認をしました。試走会のコースも設営できています。

 高木先生からのメッセージ
高木先生からのメッセージ
「ロボットは作りました。動いたから出場します」では、いつまでも勝てません。必死でやっているのか、のんびり楽しみながらやっているのか、端から見ていても判ります。
ロボットを作ることは、時間をかければ誰にでもできます。その中で、他のロボットより0.1秒でも速く動く、人より少しでもいい成績を残せるというのを目指すから難しいんです。
大会で、トラブルが発生して動かないという結果がでることもあります。しかし、結果的にダメだったのと、「動かなくても仕方ない」と取り組んでいるのとは違います。日頃の活動で、必死な取り組みが伝わってこないのは問題です。
やっていることの細部は、本人にしか判りません。端から見て判るのは、その人が必死になっているか、手をついているかだけです。
本気で必死になって取り組んだことは、将来、必ず役に立ちます。ギリギリのところを目指して頑張るという姿勢が、技術者として一生役に立つ経験であり勉強になります。
大会には、それまで苦労したことが全て出ます。今の努力が、大会で評価されるんです。結果がでなかったから、全てが無駄になるわけではありません。でも、結果がでた方が、絶対、嬉しくて楽しい。そして、自信になります。
上級生が先頭に立って必死で活動をしてください。それを下級生が見て、後に続きます。頭と体を使って、技術を向上させてください。
カテゴリー: 活動報告
新型機の進捗
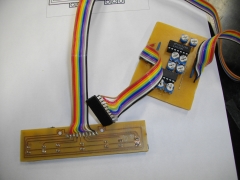
マクソンモータと新基板で新型機ができました。直線とカーブの走行はできています。ソフトの問題で、クランクと直角カーブがクリアできないので、調整しています。(石村仁志君:医療福祉工学科3年)


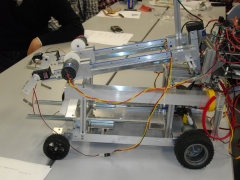
銀チーム:ハンドの改良
前回は、かぎ爪のハンドをつけていましたが、ガレキ除去や細かい動作ができませんでした。サーボをつけて、自在に動くようにしました。ロボットに取り付けて動作確認も済んだので、量産化しています。(齋藤佑一君:電子工学科4年)

黒1号機:ダミヤンへの衝撃の計測
2タイプの救助方法で、ダミヤンを救助した時にどのように違うかをグラフ化しました。ダミヤンを斜めに保持したタイプの方が、前後の揺れに対して、衝撃が少ないということが判りました。本番には、斜め型の屋根を採用したいと思います。(浦野蒼士君:電子機械工学科2年)

