大阪電気通信大学 J号館 610教室で自由工房のオリエンテーションやってます。
期間は4月4日(金)~4月6日(土)までしているのでぜひ来てください。

大阪電気通信大学 J号館 610教室で自由工房のオリエンテーションやってます。
期間は4月4日(金)~4月6日(土)までしているのでぜひ来てください。

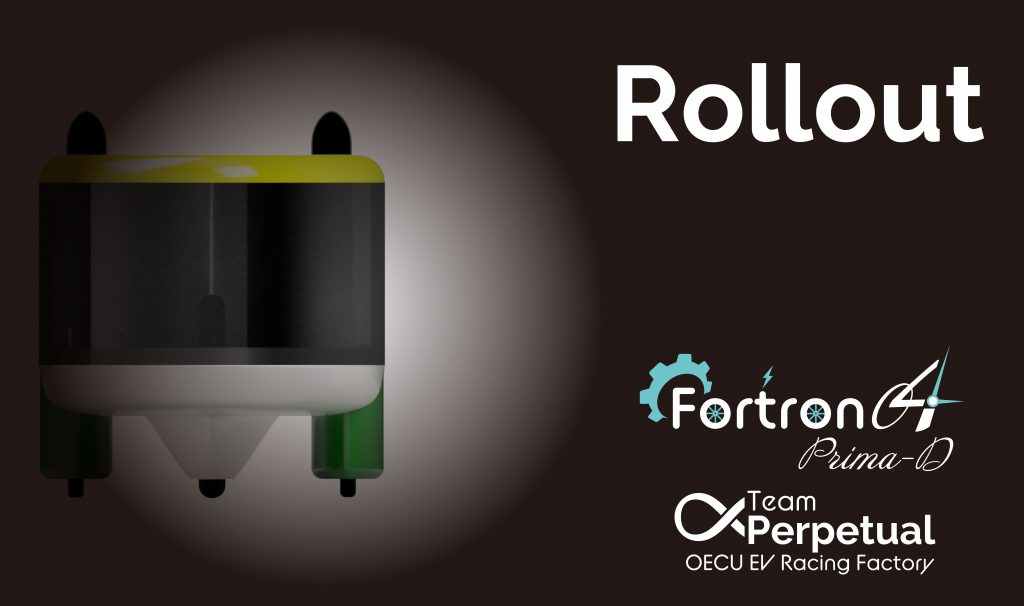
自由工房EVプロジェクト(Team Perpetual)の
2019年度大会に参戦するレース用電気自動車の発表です。
車体の名前は、Fortron04 Prima-D(フォートロンゼロヨン プリマディー)です。Fortronは運命の車輪の女神Fortunaと電子を表すElectronからの造語で、車輪と電子を掛け合わせた名前になっています。
04は車体の通し番号、Prima-Dは後述する駆動方式から取られており、駆動方式によりSmart-S , Soleil-Tと変化します。
上段の車体番号はPE401-dです。下の80は最高速度を表しており、KV2は参戦クラス、DC24Vは電圧を表しています。
主要諸元を以下に示します
主な特徴
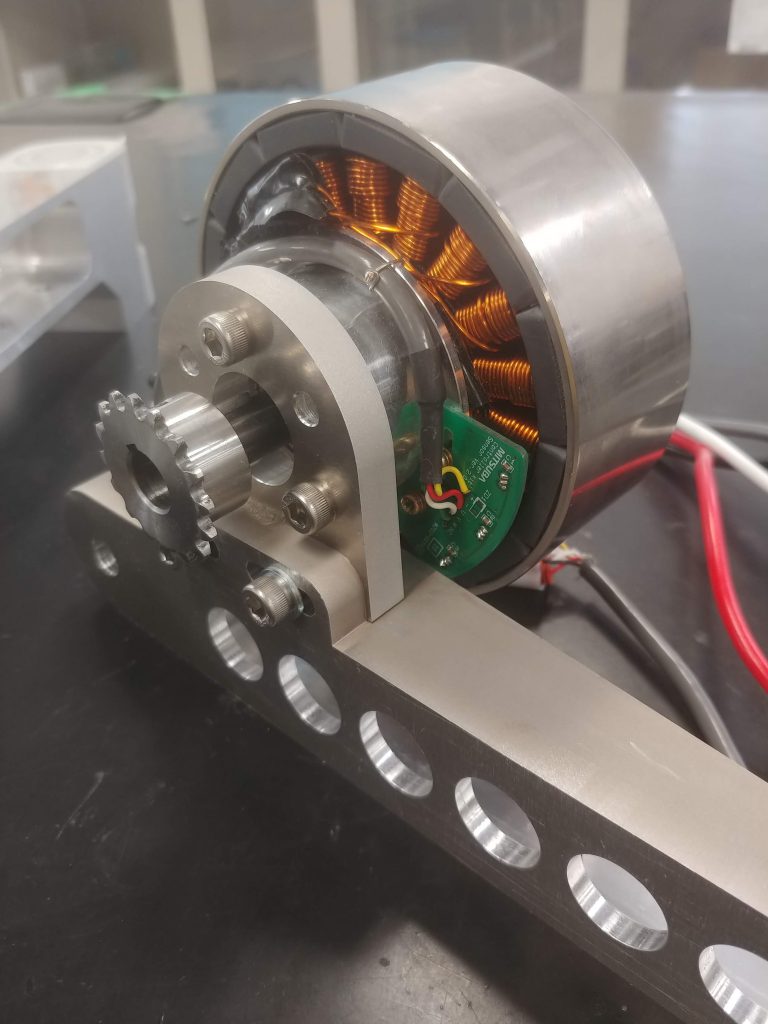
二つのモータを搭載しており、加速時や登坂時にはギアモータを使用し、平地等や高速走行時は効率に優れたインホイールモータに切り替えるハイブリッド方式を採用しています。
また高速回転に伴う逆起電力の発生を抑制し、最高回転数を引き上げる可変界磁機構を搭載しており、上記の二つであらゆる速度域に対応し、一台で様々な大会に出場できる車体を設計しました。
ハンドル周り及びホイールはアルミニウム合金を使用し、大型のマシニングセンタを用いて一体型削り出しホイールを製作して頂きました。

ハンドルはダブルコラム式ステアリングという、左右に地面と垂直に固定された棒を倒して操縦する方式で、これで乗り降りがしやすく、視界が向上します。
車体は軽量で強度のある木材、ランバーコア材をメインフレームに採用しました、Altair社のCAEソフト、Inspireを提供していただき、解析を繰り返し木材でも高速走行に耐える強度を確保しました。
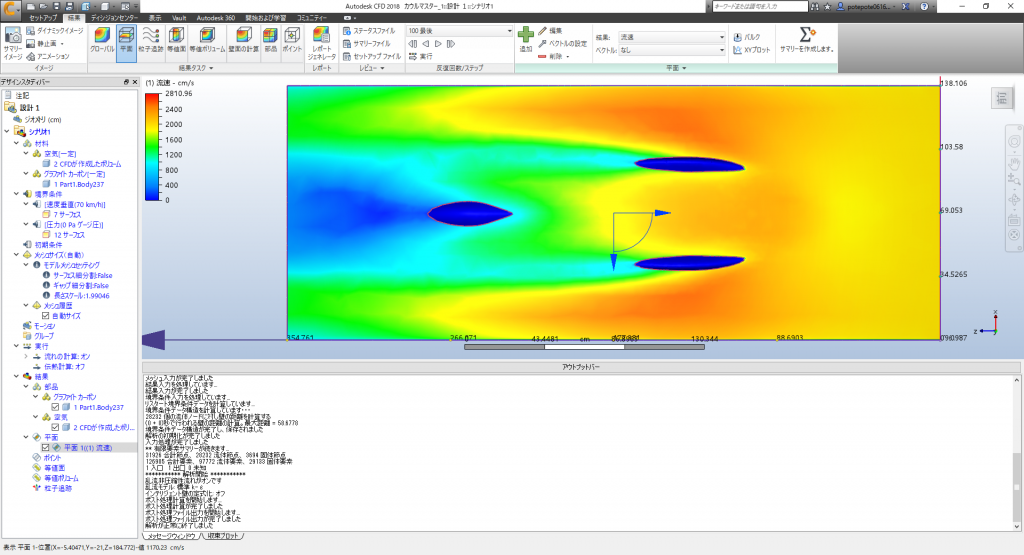
カウルはカーボンファイバーとグラスファイバーになっており、Autodesk社の流体解析ソフトCFDを使用し、50km走行時の抗力を500gまで低減しました。
外観は大阪電気通信大学のロゴをイメージし、緑と黄色を差し色に取り入れました。

先日自由工房にて、追い出しコンパが行われました,
今回からヒト型プロジェクトの方々と共同で卒業生の先輩方をお見送りし、今までの感謝とこれからのご活躍をお伝えし、和やかな雰囲気の中パーティを楽しみました。
先輩方には色々なことを教えていただきました、先輩方から受け継いだ技術や知識等を絶やすことなく、自由工房をより良いチームにできるように頑張ります!
今までありがとうございました、これからのご活躍に期待しています。
3月23日にレスコンボード講習会がありました。レスコンのロボットに欠かせないTPIPの使い方について色々学んできました。使いこなせるよう頑張ります!!

2月24日バンドーバンドー神戸青少年科学館で第34回 ROBO-ONEが開催されました。自由工房からは4名が決勝トーナメントに出場し、ハードラックスが3位に入賞しました。


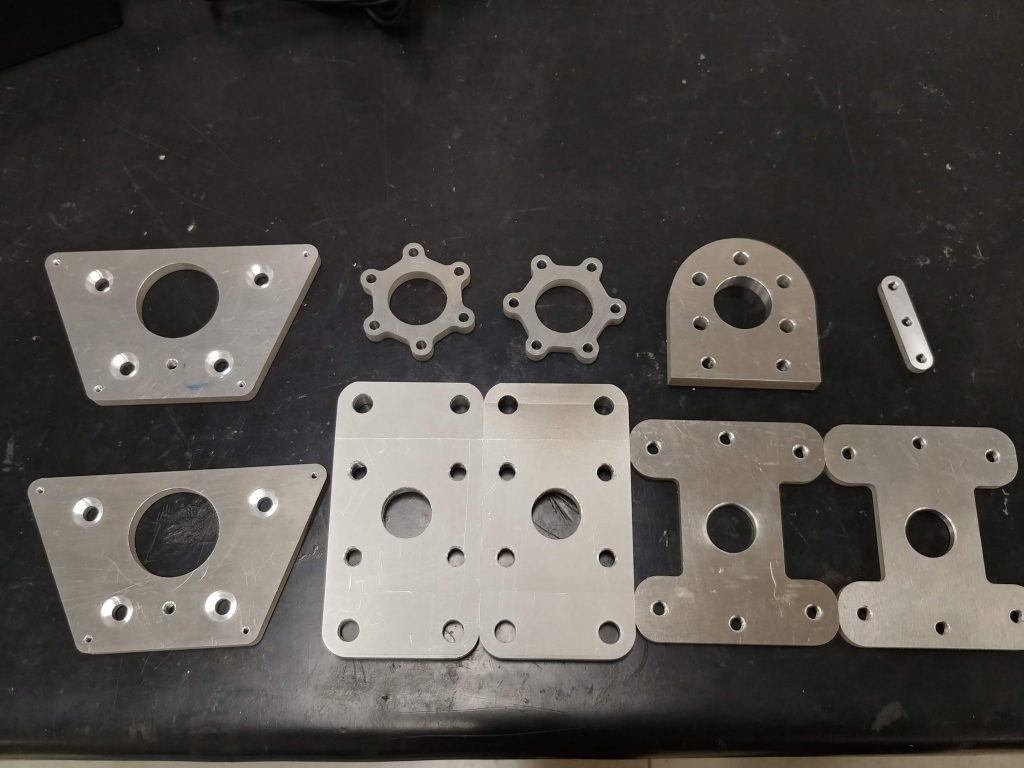
先日投稿した電気自動車の部品の件で、追加で部品の加工が完了したので
紹介したいと思います。

真ん中の大きな部品が前輪を支える部品、アップライトです。
左下がリアホイールを支えるスイングアームになります。
スイングアームにはモーターを取り付けられる構造になっており、
チェーンを介して動力が伝えられます。
今月末にすべての加工が終了する予定なので、
次は組み立てのシーンを紹介したいと思います。
それではまた。
3月2日(土)、大阪産業大学で開催された2018年度「近畿学生2足ロボリーグ セカンドステージ」最終戦で、本学自由工房ヒト型ロボットプロジェクトが2部門で1位となりました。これによりリーグ内の年間順位が確定し、年間チャンピオンとなりました。


先日、大学の職員の方に学内の工作機械を使用して、電気自動車の部品を加工して頂けるようにお願いをしていたのですが、それが本日加工が一部終了し、加工された部品が返ってきました。

材質はA5052アルミニウムです、これらの部品は主にハンドル周りに使用されます。大学内には非常に高性能な工作機械が導入されており、電気自動車に使う大きな部品等を製作するのに非常に役立っています。
まだまだ加工をお願いしている部品は残っているので、加工完了次第報告出来たらと思います。
それではまた。
自由工房マイクロマウス班も他の班に続きブログを再開することになりました。
活動報告や大会レポート等をメインに出す予定です。
宜しくお願いします。