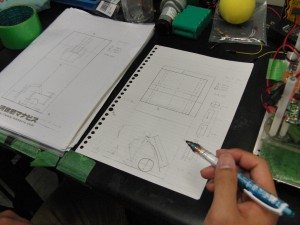
新型機の設計をはじめました。ロボットがつかむオブジェクトは、空き缶、ボール、水の入ったペットボトルと3種類あります。1本のアームで全てに対応できるように機構を検討中です。(上神健二君:電子機械工学科2年)


新型機の設計をはじめました。ロボットがつかむオブジェクトは、空き缶、ボール、水の入ったペットボトルと3種類あります。1本のアームで全てに対応できるように機構を検討中です。(上神健二君:電子機械工学科2年)
学科によっては、C言語を学ぶ授業がないため、自由工房でC言語の講習を行います。マイコン制御は、ロボットを動かす上で基本となるので、この機会に基本を覚えてください。(中尾隆幸君:環境科学科2年)


OECU杯 ヒト型レスキューロボットコンテスト 2015を共催しました。13体のヒト型ロボットが、レスキュー活動の技術を競いました。自由工房のヒト型ロボットプロジェクトから3体、レスコンプロジェクトから1体参加しました。

C言語の勉強で、四則演算プログラムを作りました。数字を入力して計算をします。ユーザーインターフェイスがわかりにくいので、改良したいと思っています。(藤本 創君:電子機械工学科1年)

C言語講習を行うので、メンバーのスケジュール調整ミーティング。開発環境のインストール方法を説明したので、講座開始までに環境を構築してください。(中尾隆幸君:環境科学科2年)


ロボットに大きさの制限があるので、その中でどのようにアームを取り付けるか検討中です。オブジェクトをカゴにいれることを考えて、重心の移動も考慮しつつ、11月末までに設計を完了させる予定です。(上神健二君:電子機械工学科2年)
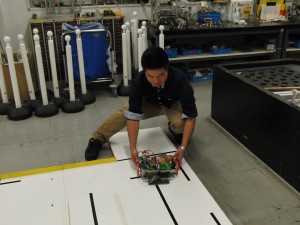
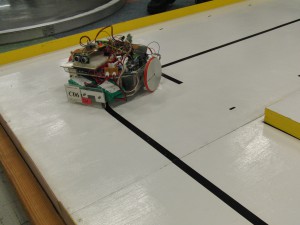
Arudinoでロボットを制御できるようになりました。ラインセンサーを3つしか積んでいないので、カクカクした動きになっていますが、ちゃんとトレースして走っています。(上神健二君:電子機械工学科2年)
24日のマイコンカーラリー試走会の準備があるため、ミーティングの開始時間を18:00に繰り上げます。(大西智之君:電子機械工学科3年)